A trophy truck, features drive with A Continuously Variable Transmission (CVT), steering and suspensions.

Direct purchase of the instructions


Trophy Truck With Continuously Variable Transmission
Preview of the instructions at the end of the article.
Building a vehicle with a constinously variable transmission was a will for a long time, since I have built the first CVT mechanical system, inspired by Zblj’s work. Here is some explanation you can find on the first link to understand how does it work :
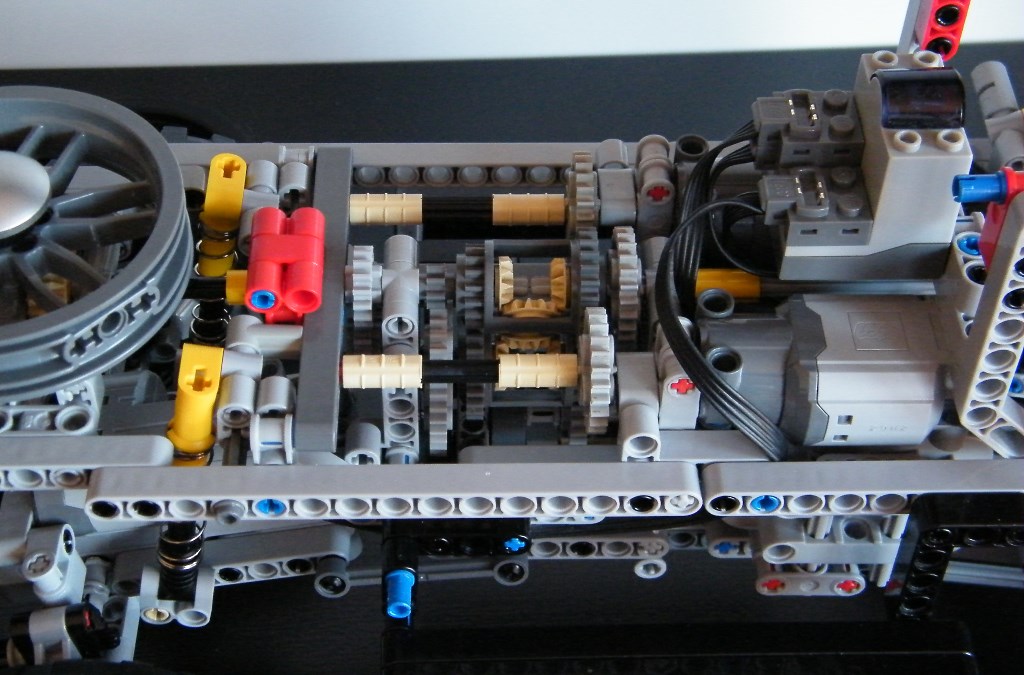
It enables a variable ratio on the output from 1:1 to 1:5. The CVT chooses the most suitable ratio functions of the resistive torque on the output. The principle is based on two differentials which are connected side by side with a first gear : 1:1 and a second gear on the other side : 1:5. The side with the 1:5 gear has also a friction pin in order to limit the rotation.
While there is not resistive torque (or low), the rotation goes through by the 1:1 gear because the 1:5 has locking torque thanks to the friction pin. When a torque is detected, the friction pin starts to spin and the rotation goes through the 1:5 gear which reduces the speed and increases the torque, the speed of the motor remains constant.
This CVT enables to have :
- A constant speed of the motor (200 rpm)
- A infinity of variable ratio between 1:1 and 1:5
- A variable speed between 200rm (1:1) and 40 rpm (1:5)
- A variable torque between 50N.cm (1:1 = motor torque) and arround 250N.cm (1:5)
Of course, some torque are lost because of the friction pin but the torque is increased by 5 so the loss is negligible regarding the increase.

Nevertheless, including the CVT in a vehicle was very hard to manage and success, especially because of the weight. The performances of the CVT are functions of the friction pins in, it determines the amount of torque the CVT can pass before switching to lower ratio. If the required torque on the wheels of vehicle is to high, the CVT is always in lower ratio, never in higher ratio, which is of course useless. There are two basic ways to solve this problem :
- increasing the friction of the friction pin which permit to have more available torque before it starts to turn (hard to manage and not really energy saver)
- having the less amount of torque on the friction pin, like that, the CVT can use the two ratio (Then, will the CVT have enough torque to move the vehicle ?)
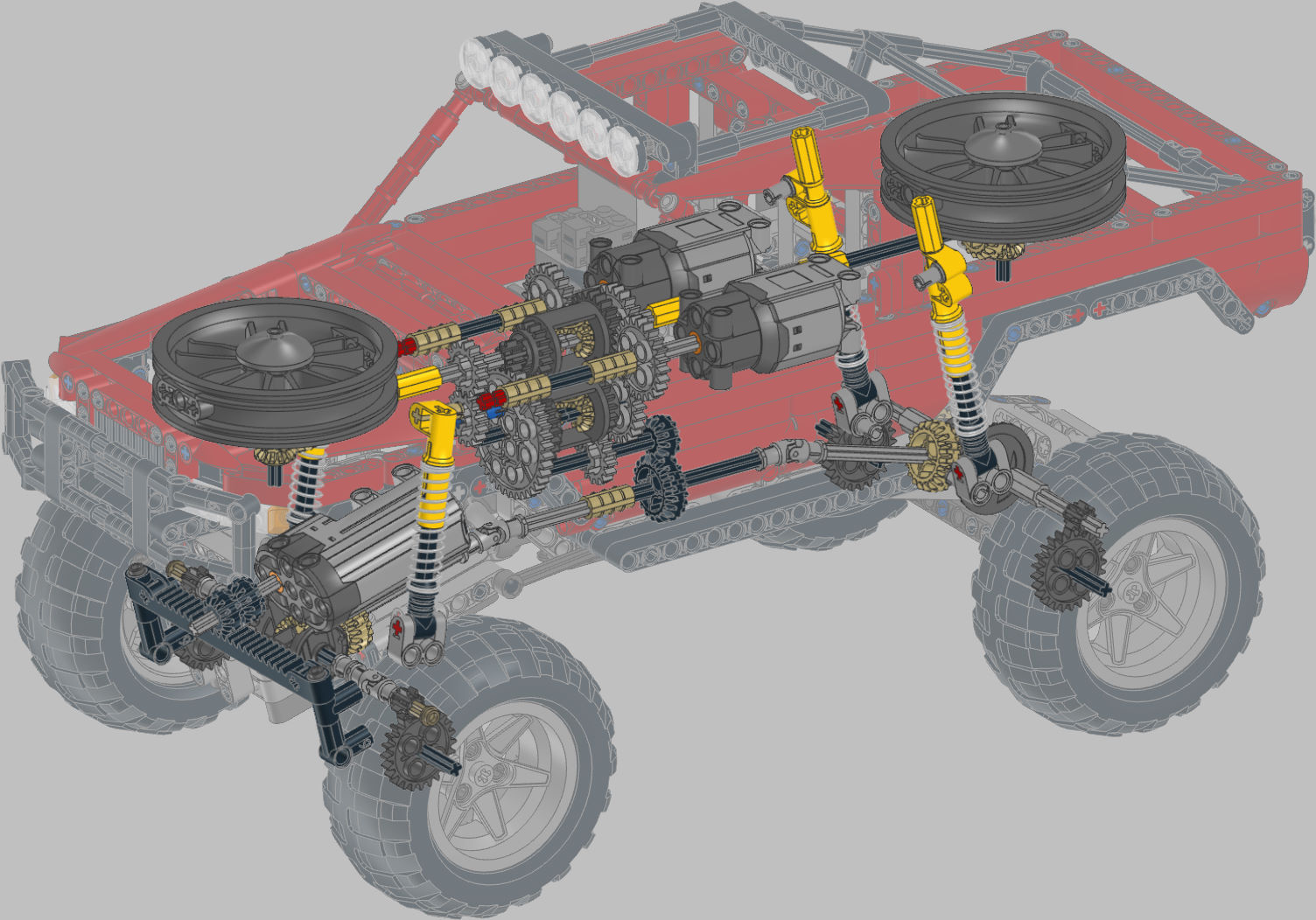
Therefore, the CVT must be placed nearest of the motor in the drive-train with no torque amplifier such as gears. That is why I have placed the CVT directly after the motors and the two motors drive the CVT with a 1:1 ratio. The choice of the motor has been also important : using a high torque motor will cause always slipping on the CVT and 1:5 ratio as result (no use of 1:1). That is why I have chosen a motor with high speed and lower torque as a XL : two L motor.
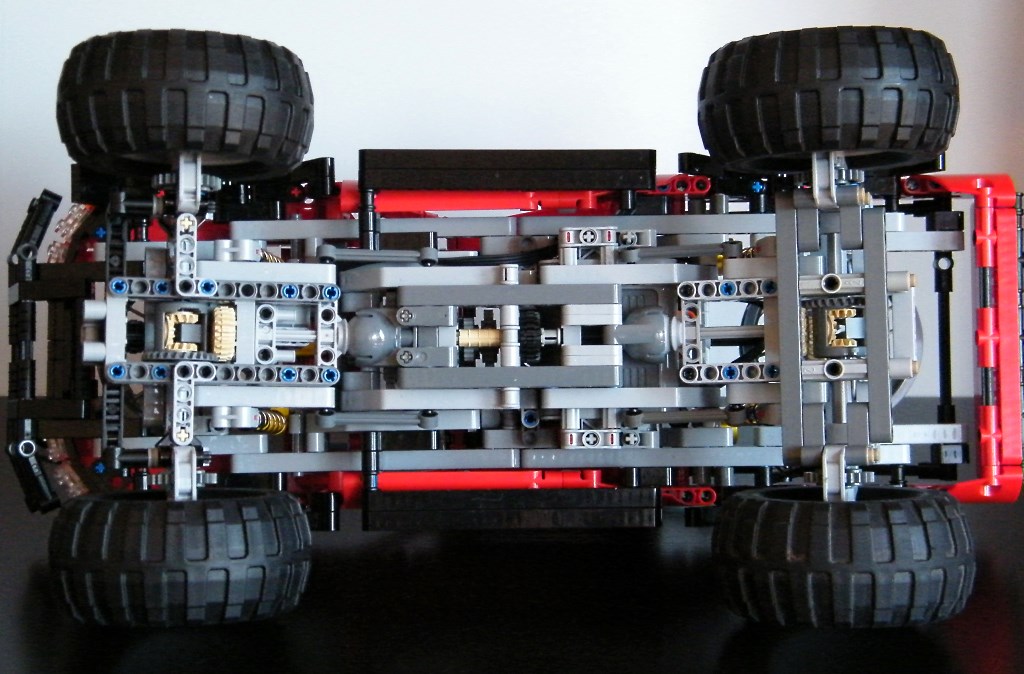
After the CVT in the drive-train, I have placed a gear reduction in order to have enough torque on wheel without compromise the functioning of the CVT. I placed a 12/20 reduction, then a differential on each axle (20/28t) and then a portal live axle with 8/24 reduction. This combination of gearing ensure to have good speed at 1:1 ratio (12/20, 20/28 ad 8/24) and low speed / high torque in 1:5 ratio (8/40, 12/20, 20:28, 8/24). The differential on each axle is essential for functioning of the CVT. If not, it will be always in 1:5 ratio when turning (due to speed difference between inside and outside wheel).
Concerning the steering, it is very simple, powered by a servo-motor attached directly on the axle and gear a rack pinion with Ackermann effect. The suspension are based on my previous crawler with 5 links : a ball-joint, 2 connecting rod, and 2 shock absorbers.
The last but not least : the rotating wheels of inertia. They are connected to the drive-train. Each wheel is connected to a side of the CVT. The front wheel is connected to the 1:5 ratio axle, and the back wheel to the 1:1 axle. When a wheel rotates, it indicates the chosen ratio. If the two wheels rotate, the ratio is a combination of two (proportional to each speed of wheel). Therefore it has a design and demonstrative roles. But the first aim of each wheel is to give inertia to the system of CVT. The wheels are difficult to put in rotation and when they rotate, difficult to stop, thanks to inertia. This property is used for the functioning of CVT which tends to have a functioning smooth and progressive. Without wheels, the CVT switches of the ratio very quickly, and when I don’t want (acceleration, small obstacle). Thanks to that, the CVT has a latency and changes its ratio when the conditions are required (climb, steep), and not on small or ephemeral obstacle.
Here is the video :
The performance are good, of course the vehicle is heavier with a CVT (1kg500, 2-300gr more) but the functioning of the trial truck is really good : fast on flat ground, and slower with high torque for climbing, also the fact that the CVT changes automatically is really appreciable and valuable for driving. It is handier for the remote of the truck. The clearing abilities are the same of my Trial Crawler but with a automatic adjustable speed.










Building Instructions

The pro instructions are available, thanks to ForelockMocs, which are step by step high resolution computer generated instructions with partlist, flexible parts, highlighted parts in the same way as official Lego one. The picturing bill of material are visible in the instruction previews and includes in the instructions.
![]() Want to know if you can build the CVT Truck ? The model has been indexed to rebrickable, check it !
Want to know if you can build the CVT Truck ? The model has been indexed to rebrickable, check it !
You can buy the instructions with the following button for 10€. You can also buy other building instructions and get an automated discount, 15% off for 2 PDF, and 20% off for 3 PDF on the total). The automated discount is available for all the instructions for sale on nico71.fr.
See it on the shop :
Trophy Truck With Continuously Variable Transmission
After your payment, you will be redirected to a page for downloading your instructions, and will receive also the link to download by email. Please check the spam box and be patient to receive it. If you have trouble to download your copy of the PDF after payment or open the document, do not make a paypal dispute, please check your purchase history or contact me using the contact form. The link to download the instructions expires within 24h. Contact me if you have lost your instructions. Note that you can print it, but not copy or distribute. Thank you for supporting my work 🙂
Here is some preview of the building instructions :









Downloading the PDF photo sequence instructions. Lego Trophy Truck With CVT By Nico71 – 19 mo, PDF



(17) Comments
Nico,
Trophy Truck
Thanks for the great job in producing the building instructions.
I am finding however that there is too much drag somewhere in the gear train and the front torque wheel is spinning far to fast making the truck to be permanently in the 1:5 range.
If I stop the front wheel, the truck instantly speeds up to 1:1, so I am thinking there must be too much resistance somewhere.
However, either in 1:1 or 1:5 there is simply no torque at all, and it will not even climb over my fingers.
I have read about the friction pin, but cannot identify the which component this is, perhaps if I understood this it may help me.
Bonjour, que se passe-t-il si on ne conserve que la roue centrifuge du côté de la grande vitesse ? Le fonctionnement ne sera pas quasi identique ?
I really like the use of the CVT! It has less flaws than the automatic gearboxes that has a number of stages. But I’m a bit worried about the friction pin getting worn down by a number of turns. Was it okay?
Good work! But I think there is a mistake in your part list: the 7x 3713 and the 4x 3673 should be “light bluish grey” instead of the old “light grey”…
Many thank to you 🙂
[…] RM8′s Toyota Prado. And since I wanted to build something cool, I decided to build and alter Nico71′s Trophy Truck with CVT. I basically tried to maintain the looks of it, but make it manual, with a 4-gear transmission, HOG […]
Hello Nicolas,
I just finished building your MOC, all I can say is BRILLIANT! To have a CVT transmission in a Trail Truck is quite amazing.
I enjoy watching it change speeds as the torque changes.
Keep up designing these great MOC’s and I’ll keep building and enjoying them!
(I had to build this to understand how this works)
A indiquer la vitesset et à joueur le role de volant d’inertie pour éviter les changements constants de vitesse si on fonctionne sur un fonctionnement entre deux.
Yes, turn one of the differential to get the tooth at the right or on the left. Check the buidlsing instructions, the differential are not good placed on your model.
Hi Nico,
I have tried to build a CVT like this, but found that when the drag is to big, the output doesnt turn at all, but the two differentials sort of counter rotate. Are you familiar with this problem and have you solved it?
WOAH Super travail, Nico!!!!
Je l’ai fait moi même et je l’ai tésté il marche d’enfer!
Juste une question, A quoi serve les deux grosse roues devant et derriere sur le capot?Juste a indiquée la vitesse?
Merci d’avance
Nicolas
Hello Nico,
another fantastic build from you – excellent job and thanks for the instructions. I was just wondering, if the actual gear reduction when in high torque mode (1:35) isn’t too much for the axles or the gears? In your opinion, would such reduction be too much in case of using two XL motors, which provide much more torque than the L motors? Thx
Still not, building a loom is so long that I make it step by step. At this time, I have tried many thing and I am not very satisfied of the WIP.
Wow!
It looks really cool. Great job. I’m waiting for the instructions.
can i build it without them?
i don’t understand, why do you need those motor cycle wheels?
Dear Nico,
I’m really looking forward, to when do you want to build/create your next loom machine. You said, you are working on an other, which is going to be better and faster. So, are you working on it?
Comments are closed.