A kinetic clock powered by a motor based on moving parts to display time.
Mechanical field of clock has been one of my favorites themes so far in Lego Technic, Today, combined with kinetic art, we obtain a kinetic clock which shows the time by moving parts.
The Concept
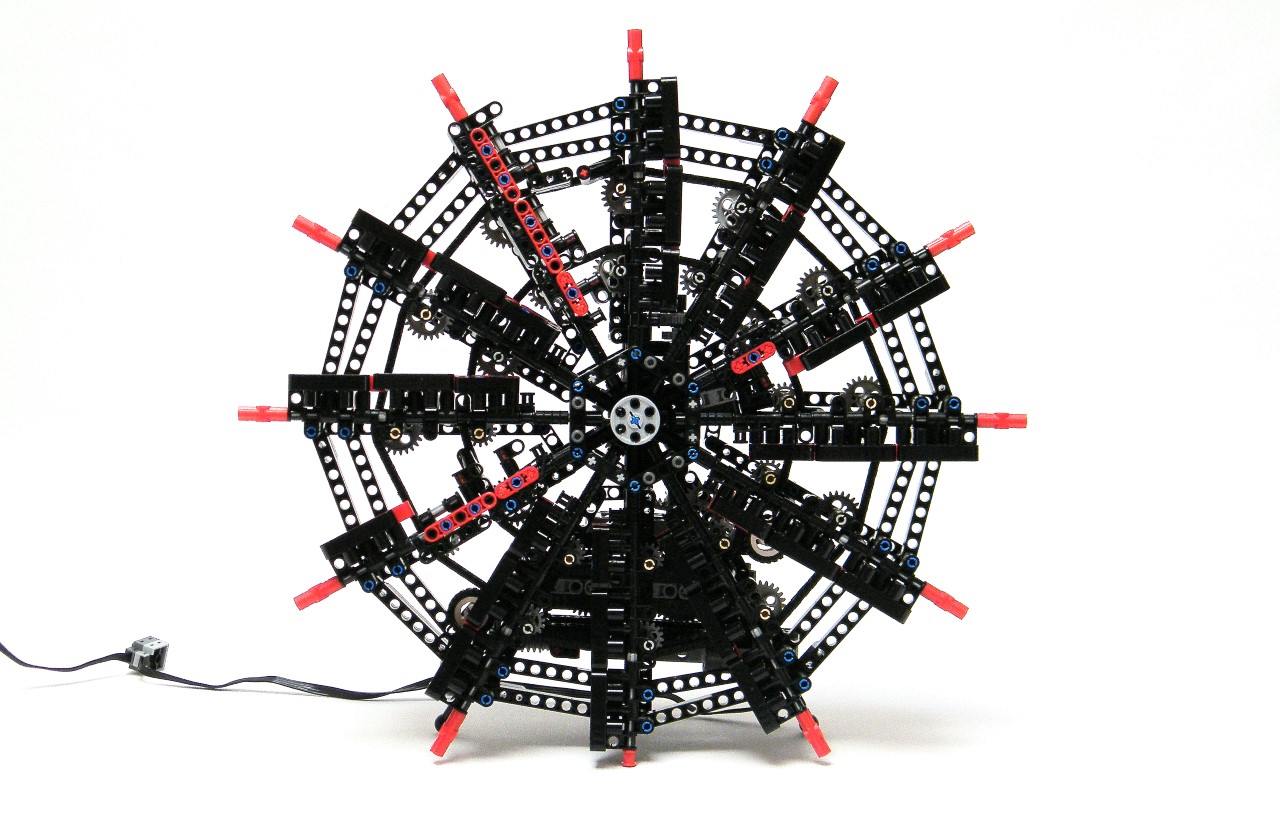
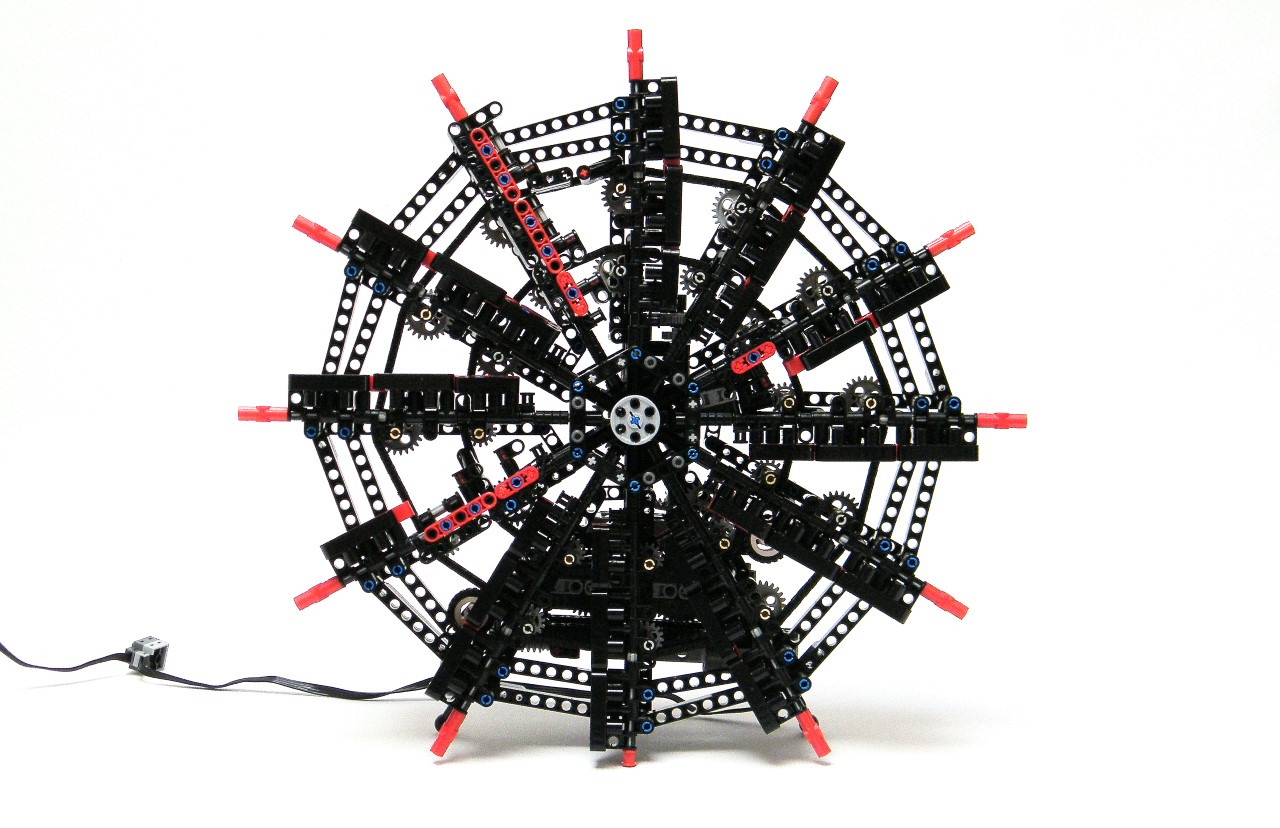
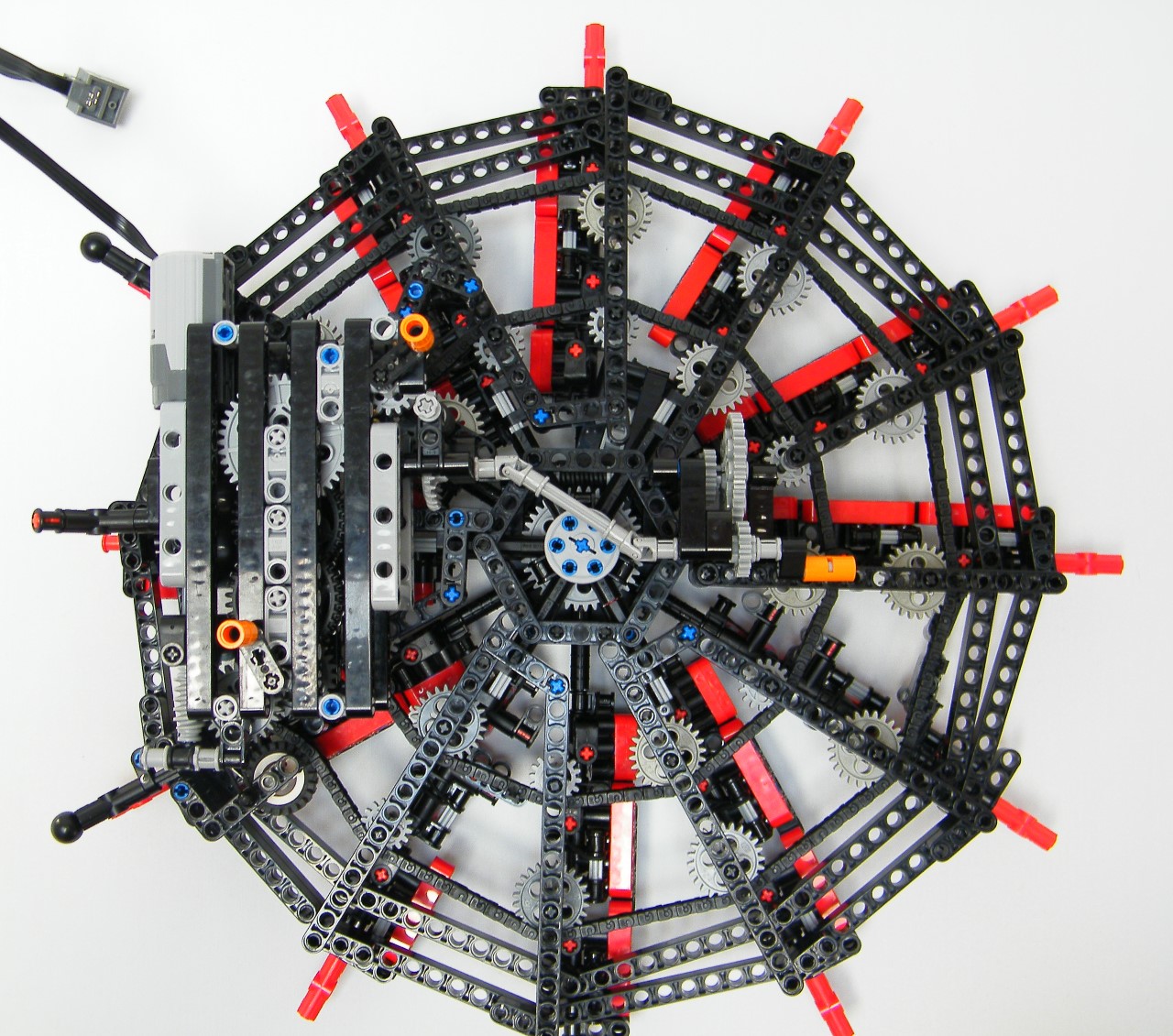
The concept is simple. Rather than showing time by moving minutes, hours and second hands (hereafter called analogical clock), I would like to have 12 fixed hands, which can move in order to show the time. This functioning is analogue to a Digital clock with 7 digits segments which turns on or off to show the number (on a classic red-digit clock). Here we are 36 Digital Segments (hereafter called digit) to show the time in a classic clock representation. Consequently, the clock is composed of 12 hands attached to the frame, with respectively 3 moving digits in order to show hours, minutes and seconds.
The Functioning
As said Before, the clock is composed of 12 hands, each hand is composed of 3 digits which can move independently. When a digit move, it reveal a red parts, hidden in normal position. In order that on calm, the clock shows only black color. But when a digit move, the red parts is shown and displays the time it is. Each digit on a single hand represents respectively, the hours, minute and seconds. The first and tinier digit is the hours, the second composed of two digit shown is the minutes, and finally, 3 digits composed a second.
For instance, on the picture above, this is 2 hours, 40 minutes and 55 seconds (01:40:55 or 13:40:55).
Now the interesting parts, how the digits are moved ? For that, each digit is mounted on a axle of rotation with a lever. For the minutes and hours, there is a pusher mounted on a chain link which travels all the circumference of the clock, and when this pusher meet a lever, it makes rotate the digit and show the color. After passing the digit, the digit is keep in rest by a rubber band.
The travel of a seconds pusher :
And the minute pusher :
Concerning the hours pusher, there was not enough room to make a chain link system, therefore I use a standard rotating arm which push the lever on each digit when it travel the circumference of the clock :
But, in order to fit to look on a real clock, the functioning must show :
- 3 digits moved (long hand) for seconds
- 2 digits moved (medium hand) for minutes
- 1 digit moved (small hand) for hours
Concerning the hours, there are no problem because the main rotating arm drives only one digit, but for the other, there is a problem : the chain link pusher system drives only one digit (the linked digit to the position : the 2nd for minutes, and 3rd for seconds). That is why, all digits of a hand is connected.
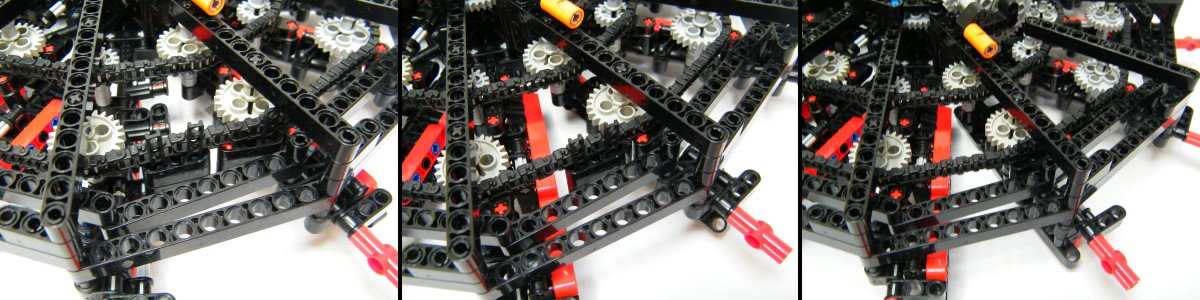
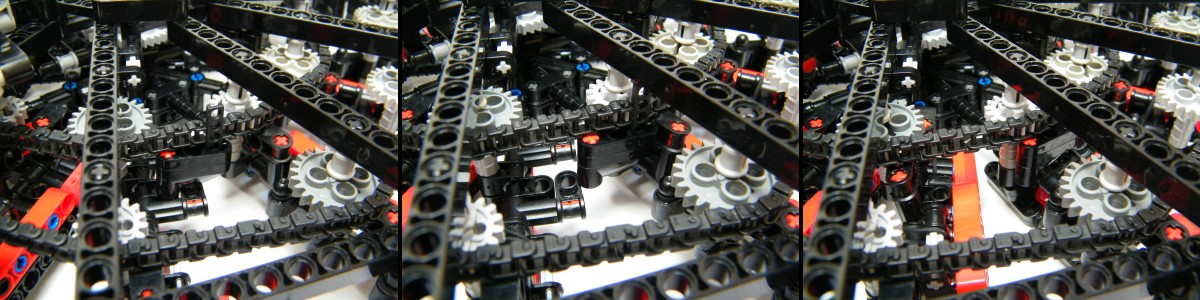
On the picture below, there are the 3 configurations of a digit-hand. You can note that the red beam of each digit is larger than the black beam, in order that when it is rotate, it drives the digit next to it. That is why :
- When the minutes digit moves, it moves also the hours digit
- When the seconds digit moves, it moves also the minutes digit and consequently the hours digit.
This configuration enables me to drive each digit independently but with having at the end the same visual functioning of a clock (it would have been possible to run it without this, but the seconds hand had been only composed of a single digit which is not very demonstrative).
Now concerning the design of the pusher, I have made many versions. I would have a clock with sequential functioning despite the fact that the basic functioning is continuous. I would like to have a digit revealed when a other digits is keep in calm with the most important acceleration available (make a Dirac). For that, I design the pusher with adjustable length. For instance, the minutes is 3-stud length but the seconds is 6-stud length, because there is more space between two seconds digit than minute digit (bigger circumference due to its radius). And to have a smooth operation with no stress when the pusher meet the lever, I use the bionicle teeth part to push the lever softly.
To finish with the functioning, the two chain link systems are composed of one strainer which stretches the chain link in order to have good tension for the system because there are some efforts to drive the whole chains and moves the digit, because of each rubber band on digit (36x). Each strainer is build in order to stretch the chain when the pusher is not here (maximize tension) and do not stretch the chain when the pusher meet because there are bigger than normal chain link due to fixation of the bionicle tooth on a large chain link thread and will broke the chain due to tension if the strainer stretch the chain at the same time. That is why, the strainer is placed in order to move and untighten the chain when the pusher meet the rubber wheel.
Calculation and Gearing
After completed the building of the digit, moving parts and driving system. I have made the most brain-explosion thing : calculate all ratio necessary for a accuracy functioning. First of all, I have chosen a 16th gears driving the chains because I have design the frame and the hands to obtain 120 chain links for seconds, and 80 for minutes, this two figures divided by 16 gives usable ratio (1/15 and 1/10).
Then here is the necessary ratio for functioning :
- 1 rotation of a seconds hand : displacement of 120 chain link : 240 teeth (chain link have 2 teeth), on a 16th gear equal to 15 ( 120*2/16) rotations of axle of the 16th gear. This is also equal to 1/60 of rotation of the minutes
- 1 rotation of a minutes hand : displacement of 80 chain link : 120 teeth, on a 16th gear equal to 10 (80*2/16) rotations of axle of the 16th gear. This is also equal to 60 rotations of the second hand, or : 60*15 = 900 rotation of driving 16th gear. This is also, equal to 1/12 of rotation of the hour hand
- 1/12 rotation of a hour hand (equal 1 hour) : 1/12 rotation of the rotating arm, equal to 60 rotation or the minutes hand, so 60*10 = 600 rotations of the 16th of minutes hand. And for one rotation of hour hand (equal to 12 hours), second hand 16th gear must rotate to 7200 time (and 7200*90 = 648000 for the second 16th !)
So we have finally the necessary ratio :
- 16th gear Second / 16th gear minute = 60*15/10 = 90:1
- 16th gear minute / rotating arm hours : 60*10/12 = 7200:1
And here are the chosen gearing :
- second / minute = 90:1 composed of 12/24, 12/36, 12/36, 8/40 = 2*3*3*5 = 90
- Minute / hour : 7200 : 1 composed of 8/24, worm(1)/24, 16/40, 16/16, worm(1)/40 = 3*24*2.5*40 = 7200
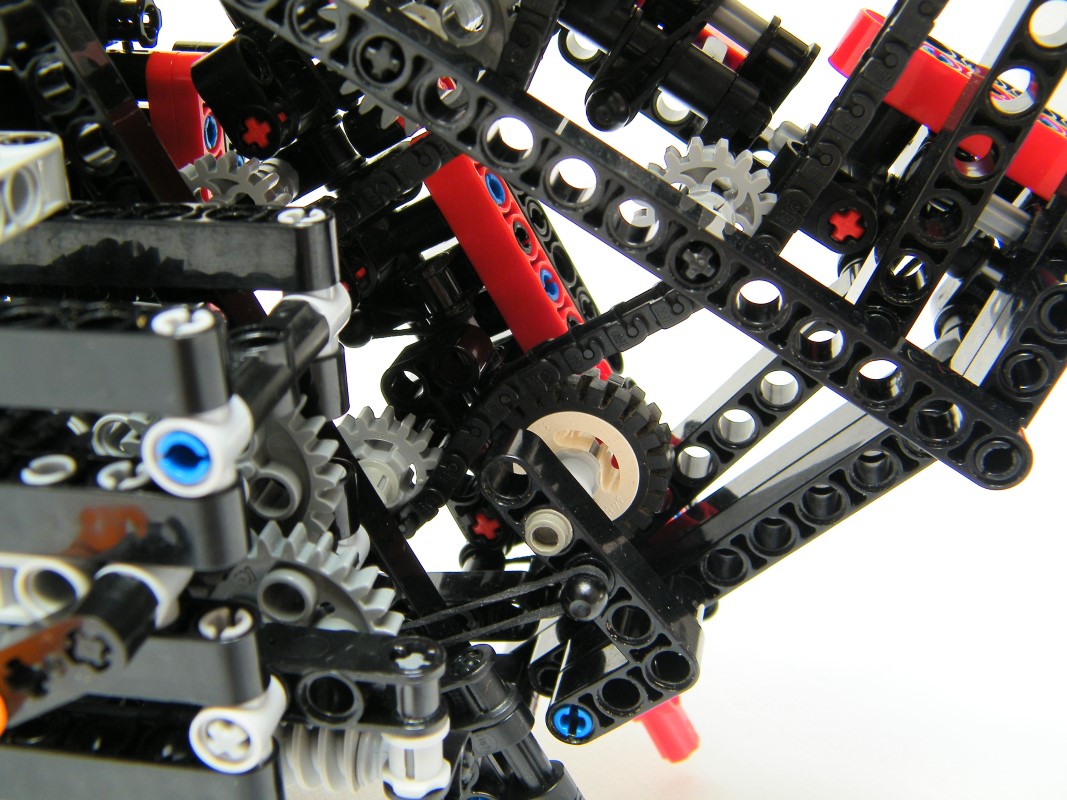
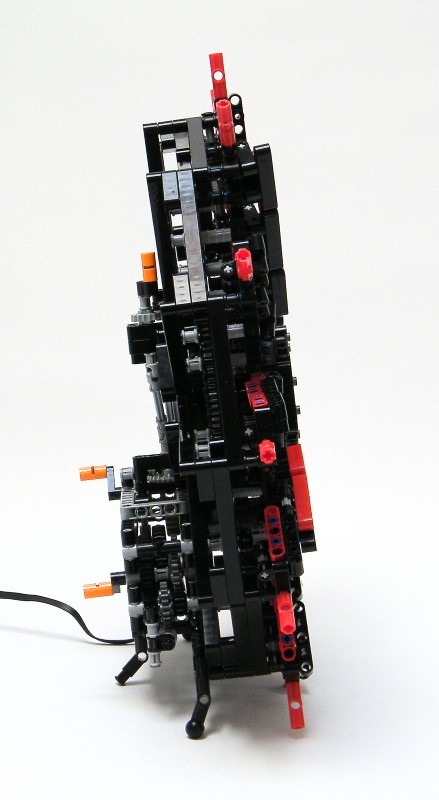
The 90:1 is located in the big gearbox behind the clock and mainly composed of spur gears. The 7200:1 is located upside the gearbox with the 24th gear on the worm screw and 2 U-joins, the rest of mechanics is hidden inside the clock on the center (wom on 40th) and are mainly composed of worm gearing because of high ratio and small room.
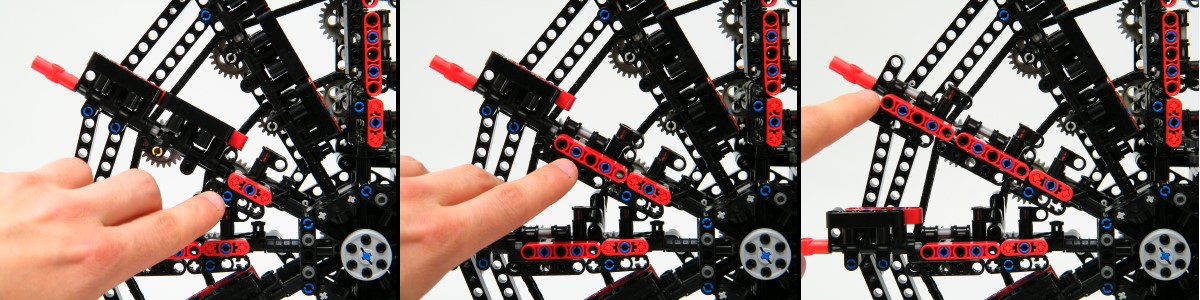
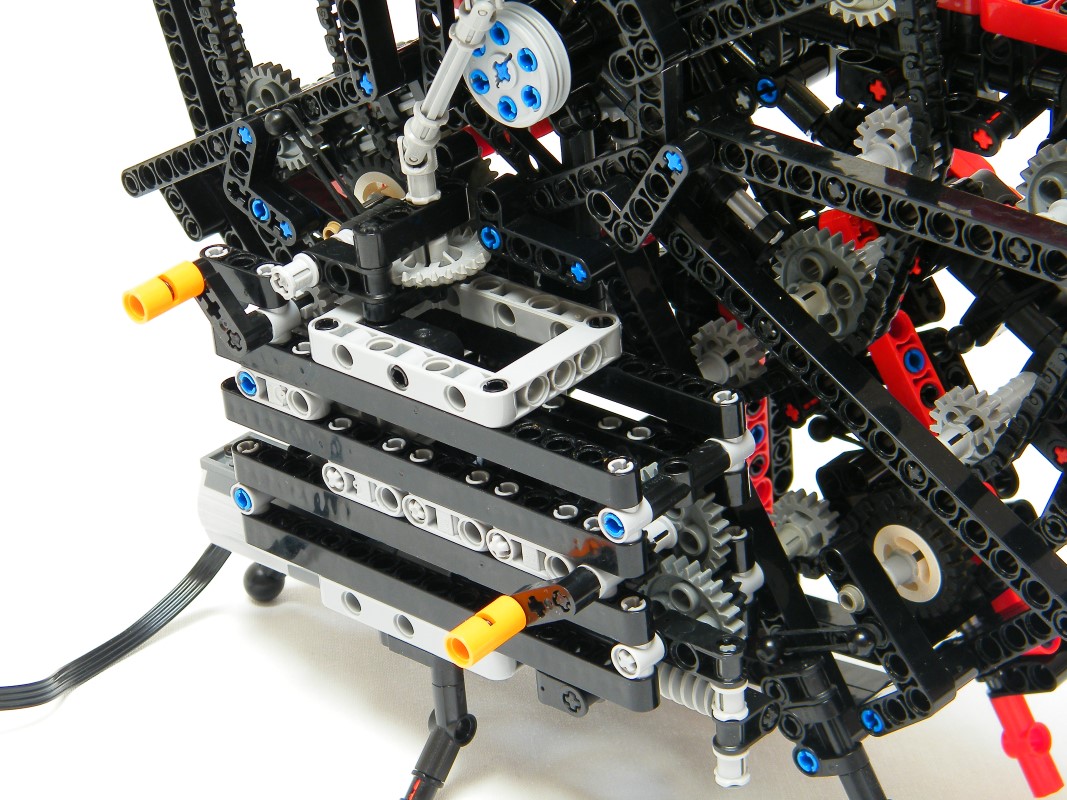
To finish, the gearbox is composed of 3 handles, in order to set the correct time on each hands. By sliding 3 gears, the transmission is totally disconnected for set up.
Accuracy and Autonomy
I have not talk about the autonomy because it is infinite ! Because the whole system is powered by a single M motor plug on a adjustable power train supply. This is the biggest deception of this moc, to have been forced to put a electrical motor because of the effort. There are quite high, because of the system of chains with strainers, lot of gearing and the rubber band on each digit (maximum, 3 rubbers stretched in the same time), so well that none of mechanical escapement system powered by weight have enough torque and stability to handle the system.
That is why I have chosen to powered the clock by a electrical motor. And to keep the correct time, I use a electrical power train supply which is analogical therefore which the finest set up. The accuracy are consequently 1 seconds each minutes, when it is correctly set up, which is rather good for lego !
Video and Pictures
Better than thousand words, the video :




Concerning the building instructions, I will disapoint you, there will not be building instructions ! Because I think this is not a good moc for building instructions (complicated, lot of parts, electrical power supply for a clock).


