Crawler wheeled snake features drive, steering, and 3 DOF articulated suspensions.

With my previous trial truck, I wanted to create something different using different layouts for a prototype of crawler. The result of my work around it is this crawler called wheeled snake because of his principle of suspensions and steering which looks like a snake. In deed each axle is linked by the other using a 3 DOF ball join which enables to have lot of mobility.
The first idea I had was to use the principle of transmission on a bobcat which is called : differential steering : a motor by side therefore two motors. In order to build the 3 DOF join, I was not able to use the ball-join in the unimog because only one axle can pass through. That is why I have built a 3 DOF join using other parts. And in order to have the transmission and the suspension movements, I used CV-join which can slide on their axle. The first result is shown under :


But.. It didn’t work well. The principle of drive-train worked but the steering didn’t work well. Because the Lego remote is binary the differential steering didn’t work and the drive-train was under stress. Even with the proportional remote, it was not really handy. To finish, the CV-join can slide on their axle so it is really good for the suspension system but when the torque becomes to high, they break away. That is why, I have chosen to remove the principle of differential transmission and have replaced by a propulsion drive-train with one axle and a separated steering. The final result is shown under :
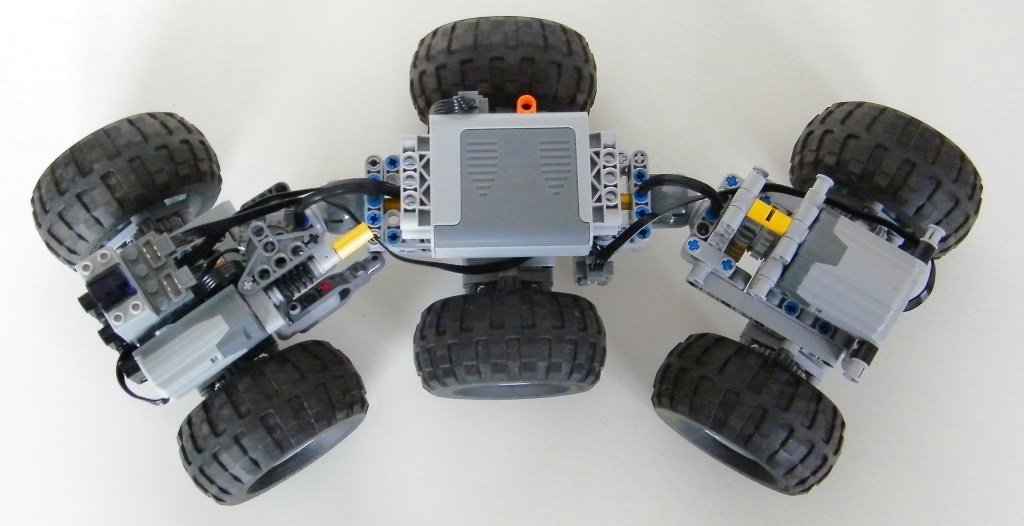
The 3 axles with differentials are driven by a XL motor with reductions : 12/20, 16/16, 20/28 and 8/24. The axles are equipped with portal axles which allow to gain more ground clearance. The steering is operated by a M motor with worm screw on a 24tooth gear and lever and arm. The steering operates only the first and second axle, the last follows like a trailer. The suspensions are made with the 3 DOF ball-joins of the unimog which enable to pass through the drive-train axle and to be robust. Concerning the suspension system, I wanted to have a free steering rotation but constrained rotation for the other DOF (swaying and pitching). After testing some solutions with springs and rubber bands, I have found the ultimate solution : simple and yet so flexible : the flex axle. It enables to constrain the suspension DOFs but let the steering free.

Concerning the climbing and off-road abilities, it is quite different from a standard trial truck but the multi-DOF articulated joins are very efficient on the ground. It enables to have the most wheels on the ground as possible. It gives also an other advantage : thanks to the high contact of the wheels, the three differentials don’t disturb the motivity, and enables a small turning radius. To finish, the low center of gravity compares to a normal truck permits a high stability on slope and banking slope. The inconvenient ? The crawler doesn’t work well in backward direction because of the system of steering (the last axle is a trailer).








The building instructions :























Also indexed at rebrickable : https://rebrickable.com/mocs/MOC-0216/Nico71/wheeled-snake/#parts



(10) Comments
[…] “rover” quello della esplorazione su Marte. A differenza del vecchio progetto 6 × 6 serpente volante , questo nuovo mezzo ha 8 ruote […]
Degree of freedom. Regards
What does DOF stand for?
Wow! This model is absolutely insane. How long did it take you to build? You have some skill.
Nice model! Concerning the trailer axle, what if you put ball joint links to connect the second and third axles?
Why without differantial lock???
Hi Nico,
great model,I love it,when you will publish the instruction?
Thanks
Hi,
would the center of gravity remain lower than that of a truck after addition of a cabin? I would not think so.
Nearly David. What you wrote in french can be translasted by : Well, I was hoping you would edit the instruction of logging/housing for this moc. Building has many meaning in english, only one in french
Bon, j’espérais que vous éditeriez des instructions de bâtiment pour ce MOC !
Comments are closed.