
My new wheeled vehicle since a long time ago ! Featured all wheel drive, steering with functional handlebar, suspensions and white design !

The Context
There was a long time ago since I have not created wheeled creations. After months making clocks and machines, I would like to return to basics with a motorized vehicle. Here is the result !

The aim was to use the white parts from New Plane #42025 from lego bought recently and the hubs of the F1 #42000 (purchased separately on bricklink.com). Back to basics, I would like to combine simple functions with nice design in a vehicle that I have never done : a quad !
Functionality
Here is the formal specifications :
- Drives on all wheel using 2 L-Motor
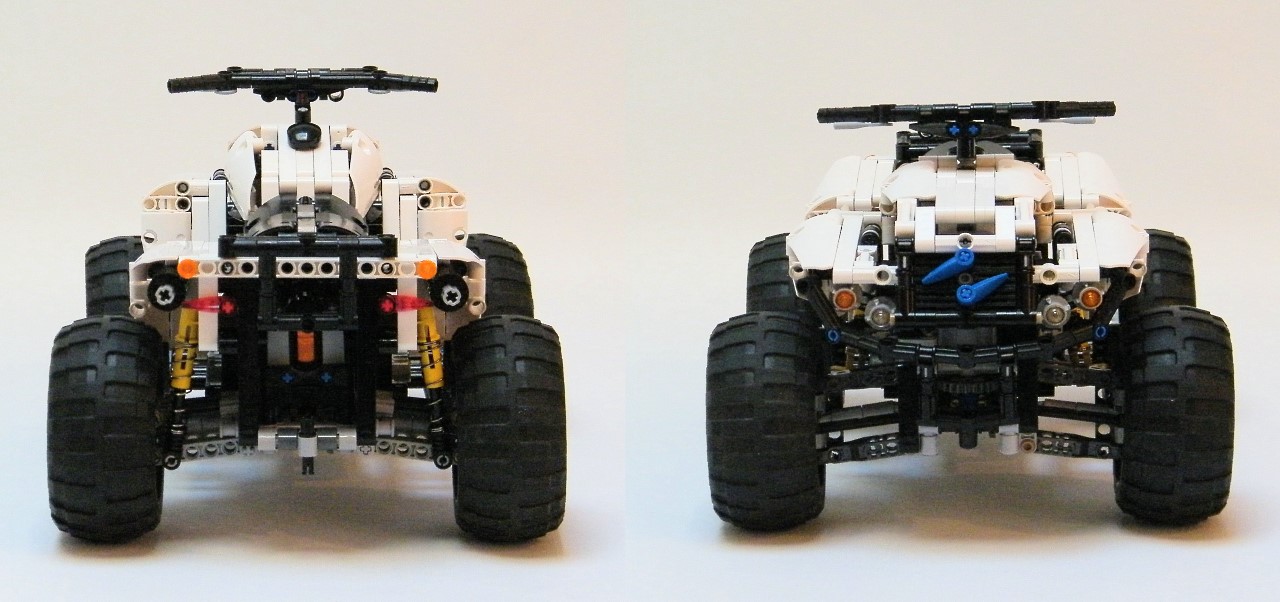
- Steering on front wheel with working handlebar using a Servo-Motor
- All wheel suspended
- Differentials on all axles, none of center
- Fake I2 engine
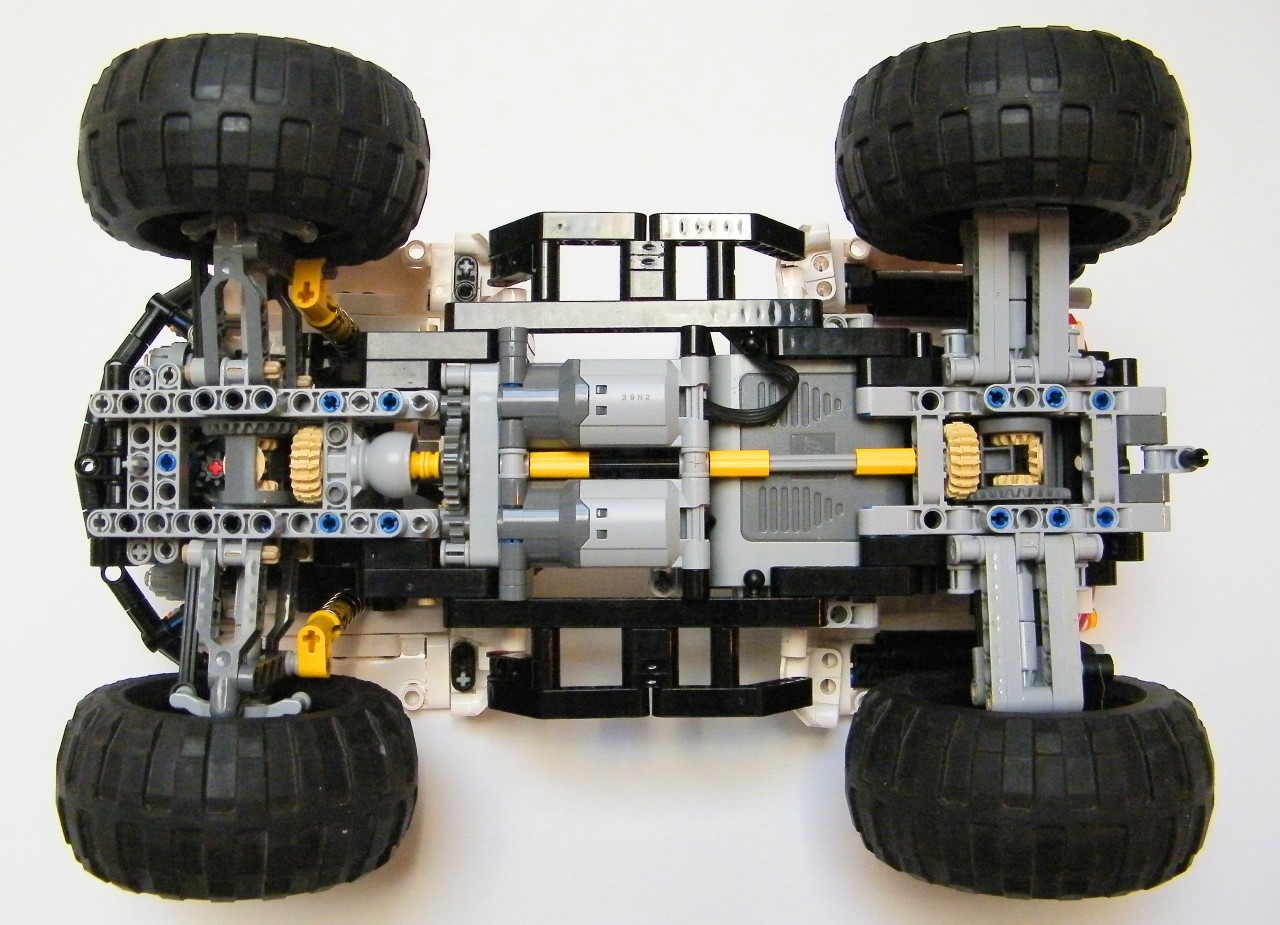
Concerning the drive. Two L-motor are connected to a 24tooth on the central driveaxle. Then each axle is powered by this driveaxle with a 20tooth gear on differential. No more reduction of gearing, in order to ensure good speed and enough torque. You can see the drivetrain on this below picture :
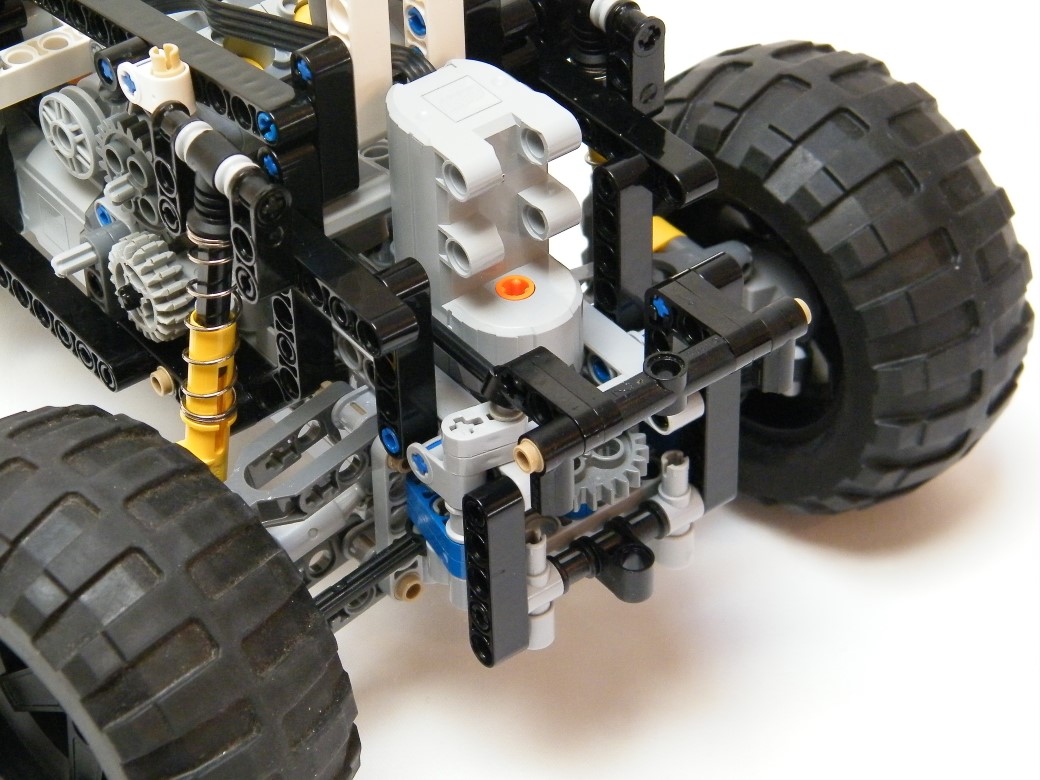
Concerning the steering, I have not used a classic rack pinion but a lever and connecting rod. Each arm of steering is connected to a beam, driven by a small lever connected to a 24tooth gear. Then, this gear is connected to a 8tooth gear on the axle of the servo-motor. In order to ensure reduction of deflection (arround +-90° for the servo to +-30°). Regarding the handlebar, it is connected to the steering by using a small lever and connecting rod. The deflection is not so important but rather good for showing the handlebar moving.
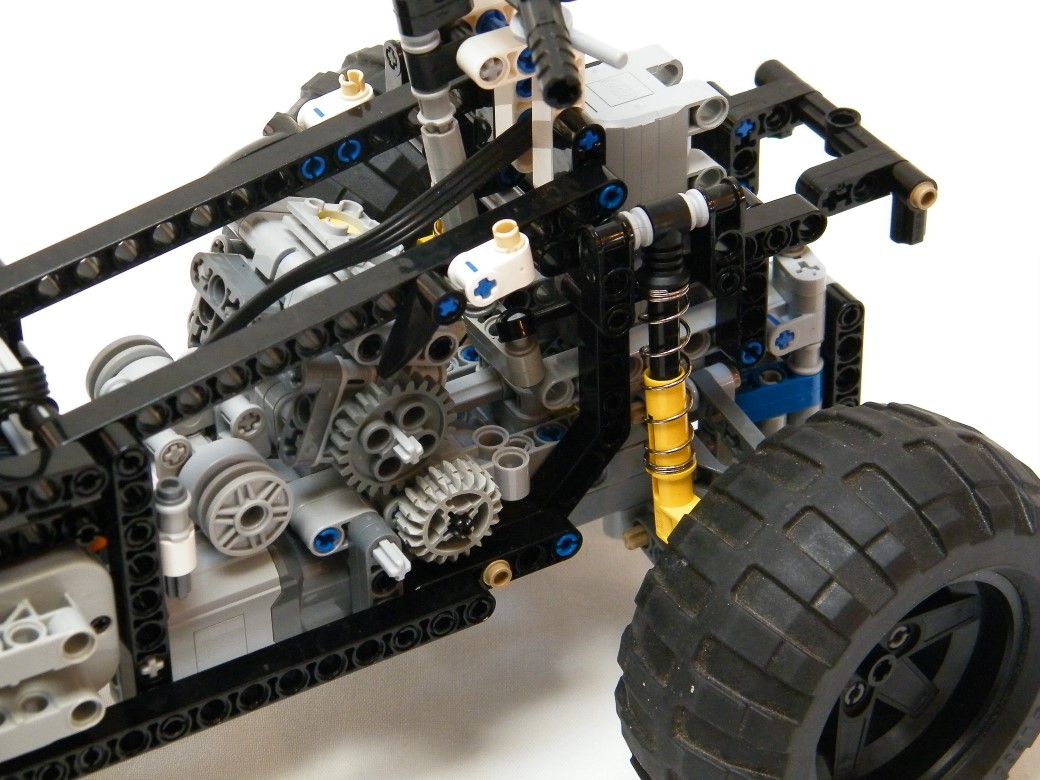
The frame is build as on a real quad, using double cradles and up frame composed of inclined beam. Then, inclined beam are also mounted to the rear to give the particular shape of the sadle. The Battery box and the IR-receiver are placed at the bottom of the quad, and on the double cradle, ensuring a low center of gravity and easy removal. The bodywork can be removed easily to show the frame as shown here :

To finish with the function with the fake engine, it is powered by the central driveaxle, with a 8tooth gear on the 24th. Then a bevel gear composed of a 20 and 12tooth gear, and finally a spur gear with 20 and 24tooth makes the fake engine driven. With this gearing multiplication, the fake engine run at 1300tr/min. also, note that I have reproduced the front inclination using angled connector.
Design Process
Concerning the design, I have tried to make it the nicer as possible. First, dealing with the particular shapes of a quad, and the lack of some parts in white (only build with the Lego plane parts). Consequently I have reproduced the shape of the wings using panel with inclination. I have also reproduced the double shaped tank, with a smaller parts near the saddle and convex upside shape. The last big element with trouble I have was the saddle. I have tried many versions with beam, flex and so on and finally chose black panels. The shape on the panels ensure a good curve of the saddle and I have created concave support to make the saddle hollowed. Finally I am very satisfied of this design :

Climbing Abilities
To conclude with the climbing habilities, they are rather good. The differentials can slip some time but ensure a good playability on sticking surface. Also the speed is rather fast thankt to the L-motor but with a good torque to climb some slopes of obstacles. To finish, the suspensions make the work, ensuring a good stability of the wheel on the ground.
Video and Pictures


















Building Instructions
It was a long time since I have done building instructions. As usual, they presents as a detailed photo sequence with a bill of material. Also available on rebrickable.com


















































































































































(9) Comments
J’ai compris que vous étiez français, donc je vais parler en français du à mon mauvais anglais. J’ai 13 ans et je suis fan de vos créations. Je créé moi même des mocs. Ce mocs est vraiment très réussi ! Dans le mode d’emploi, il y a une assez grosse faute. L’essieu arrière est disposé dans le mauvais sens puis les pages vers la fin, miracle il se retrouve dans le bon sens. Mais je vous le pardonne largement vu la qualité de vos mocs ! Continuez comme ça.
This is not in sold, sorry 🙂
Hi,
I want to buy the same kindly let me know how to purchase it and price of the same.
It is based on a Massai S600 Crossover.
What is the brand of your ATV?
You can watch it on bricklink : http://www.bricklink.com/catalogItemIn.asp?P=57515&in=S
Regards
Hi,
Awesome MOC, thank you for sharing the building instructions.
Which set contains the old grey swingarm that you was used for steering mechanism?
Thanks,
BR
Freddy
Wow, What a comment ! I agree with all your point despite one : The IR, I have placed it in order to have the playabilitiy when you are back the creations, in fact the back of the quad is completely open so I have not problem until you stay in back. Thank you for your comment about the building, you have exaclty understood the complexitiy of making such creation with design and functionality. Concerning the two towball under the frame, it is only for displaying on rotating support I have made for the video. Best Regads 🙂
Hi Nico,
I’ve rebuild your MOC and must say it’s a very fine creation. The speed is enjoyably fast and the steering quick and smooth. Even though it has only 3 steering positions due to the servomotor it’s totally fine in my opinion. Especially with the fake handle-bar steering which adds a nice touch of authenticity. I don’t see the point of differentials in a MOC that is intended to be an “off-road” vehicle, but if one uses it only indoors it makes perfectly sense. The suspension is a too hard, due to the light wight it hardy suspends. BTW the front suspension is placed a little off in your instructions; the half bushel belongs after the suspension axle hole to make it perpendicular to the framing (page 39). As also visible in the instruction the fake engine is mounted by two axle pins. Even though it fits and works fine, these two pins tend to loosen itself over time. The resulting gap is also visible in your instructions.
These are all minor flaws; the only thing that does really bother me about this Quad is the fact that you placed the IR receiver under so many panels that the car loses IR connection very often. This fail really cuts in the playability of this MOC.
Nevertheless the other technical parts of this MOC are perfectly build. I really enjoyed your idea of the front steering that is completely mounted by ball socket connections which is as said before PERFECT! I admire the effort you put in the chassis. I had a little grudge at you when I saw the 2L hoses you used in the grill, but I used a 2L axle and it also worked. So you didn’t have to “cheat”.
To sum up my impression of this MOC, I think it looks gorgeous and drives great. If it wouldn’t lose IR connection so often it would be perfect.
PS.: Can you tell me why there are towballs below the battery box?! Is it an artefact?
Comments are closed.