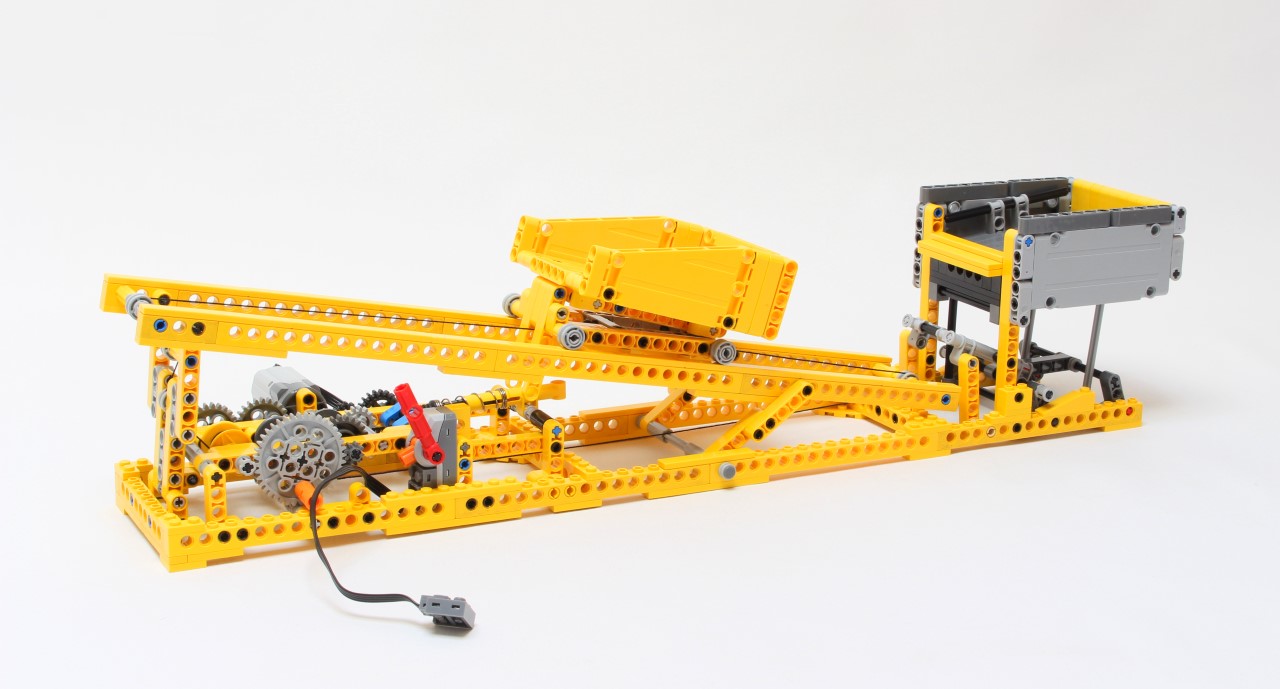
My last module developed for Diemoz 2015 exhibition. Features a motorized tipper trolley with automatic end inverter.
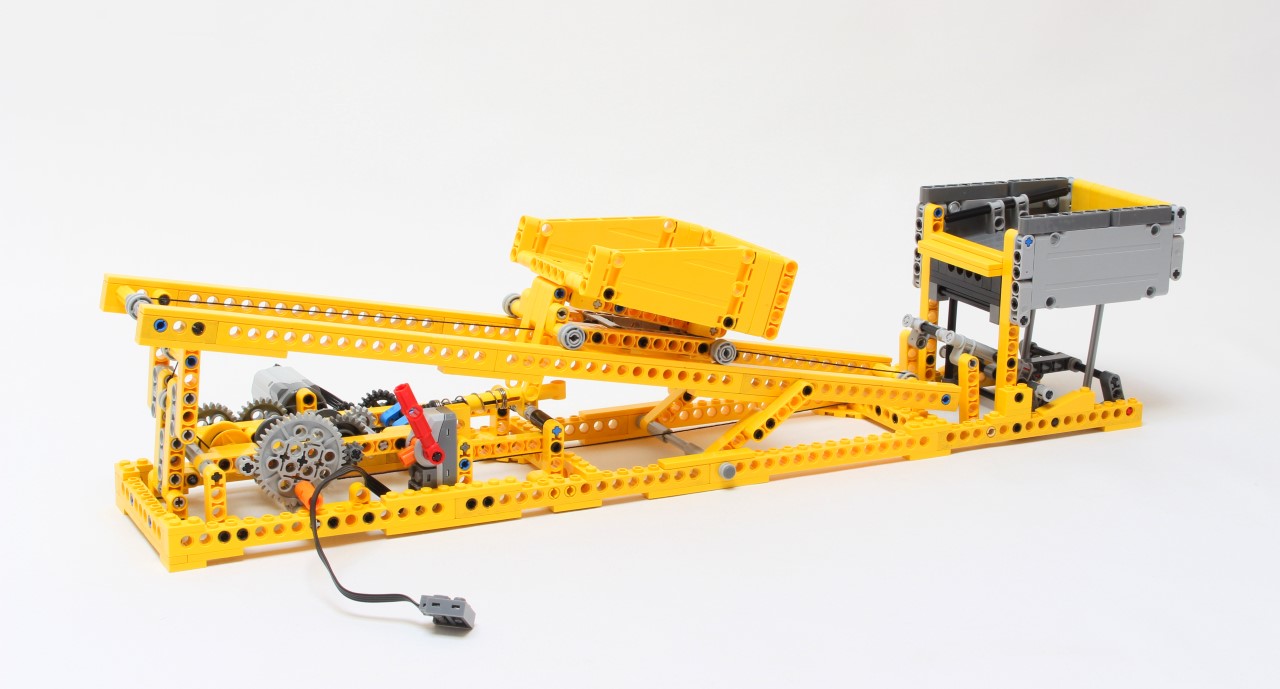
The fourth (and last) module I have created for the Diemoz 2015 Hexbition in France. Based on a simple tipper trolley which takes the ball in the input tray, and released by clibbing the slope and discharge in the output tray.

The trolley moves from right to left. To right, it comes near the input tray which is composed of a standard tray with moving floor. When the tray comes near it, it pushes a connecting rod and lever mechanism which lift the floor and release the balls inside.
 When the trolley raises the upper level of the slope, its articulated beam touches the end stop, as the tray moves, it lifts slowly the tray and the ball fall in the input tray of an other module.
When the trolley raises the upper level of the slope, its articulated beam touches the end stop, as the tray moves, it lifts slowly the tray and the ball fall in the input tray of an other module.
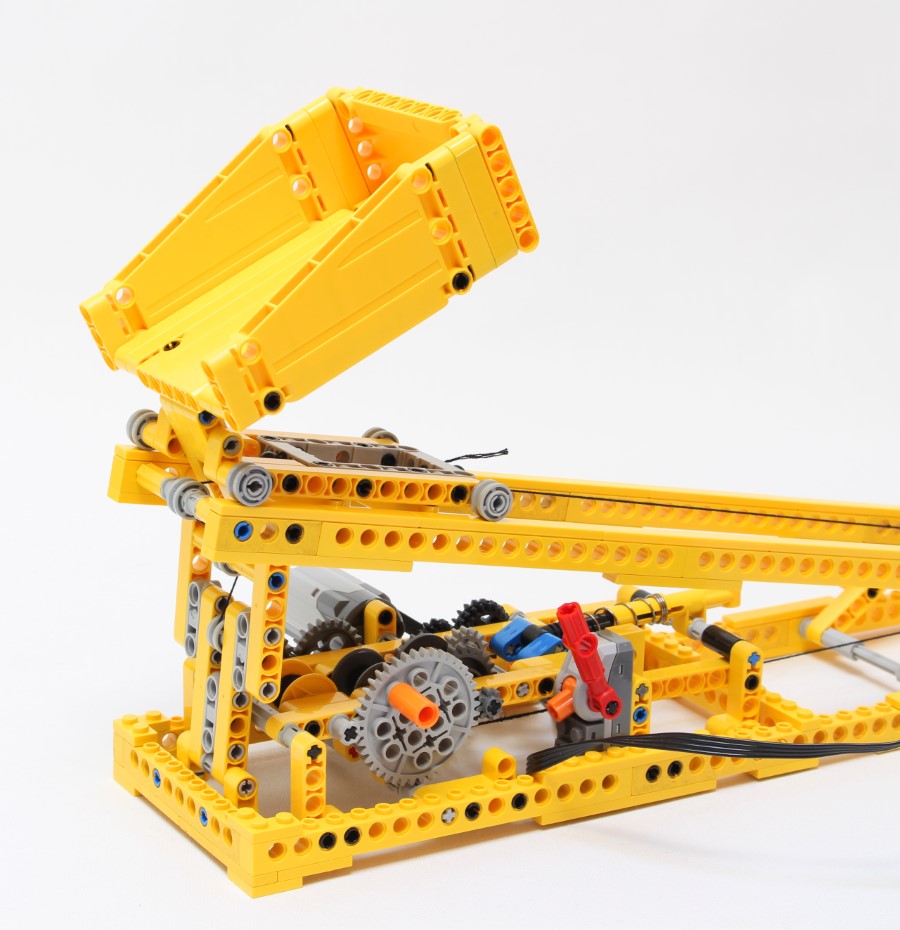
But the brain of this creation is not on theses two mechanisms, it is located inside, near the motor and gearing. It is composed of a differential which is connected to the motor in input, and on the two winch for the output (planetary gear). The last output (on the main 24t gear of the diff) is connected to a spring lever also connected to a switch pole inverter. In order that when the trolley has comes to the end of the slope, the winch can no more rotate, then the differential transfer the power to the last output which is not stalled : the spring lever connected to the pole inverter, and make it switch ! Then the trolley moves in other direction and the process is repeated.
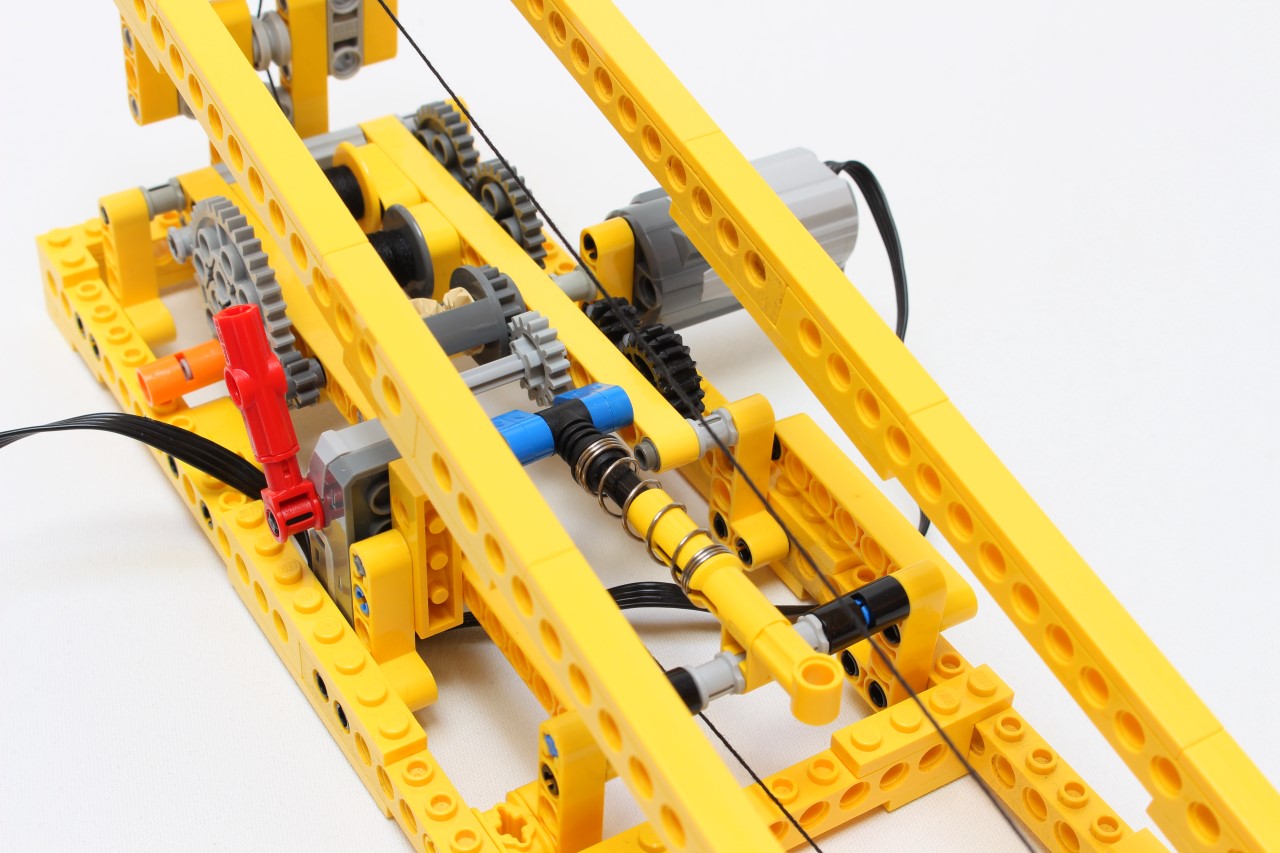
Thanks to this, the trolley is moved right to left and left to right only with a motor and a pole inverter connected to a purely mechanical switch based on differential principle.
See it in functioning :




















(8) Comments
Hello, thank you for your message but sorry there are no instructions for this creations.
Hola esto es interesante me a gustado un monton pero como compro las instrucciones un hasta luego
Hi nico, nice machine Do you have a building instruction for this technic Modell
Greets Frank
[…] Article original (Anglais): ici […]
[…] Original Blog Article (English): here […]
Hi do you have the building intructions of this GBC module?
Thank´s a lot!
Martín
Hi, thank you to have rebuilt it. If you have hard spring, put a softer one. If you have soft spring (that I assume with more windings), try to switch your switch (pole reverser), it work only with one position, in order to when the trolley comes to the end, it forces and makes rotate the differential in correct direction with operate the switch in correct direction. Best Regards.
Hi Nico,
I have tried to construct this machine but I’m not achieving success in automatic switching of directions.
Is it due spring tension, the spring I have used has more windings then you have used.
Please reply.
Thank you.
Comments are closed.