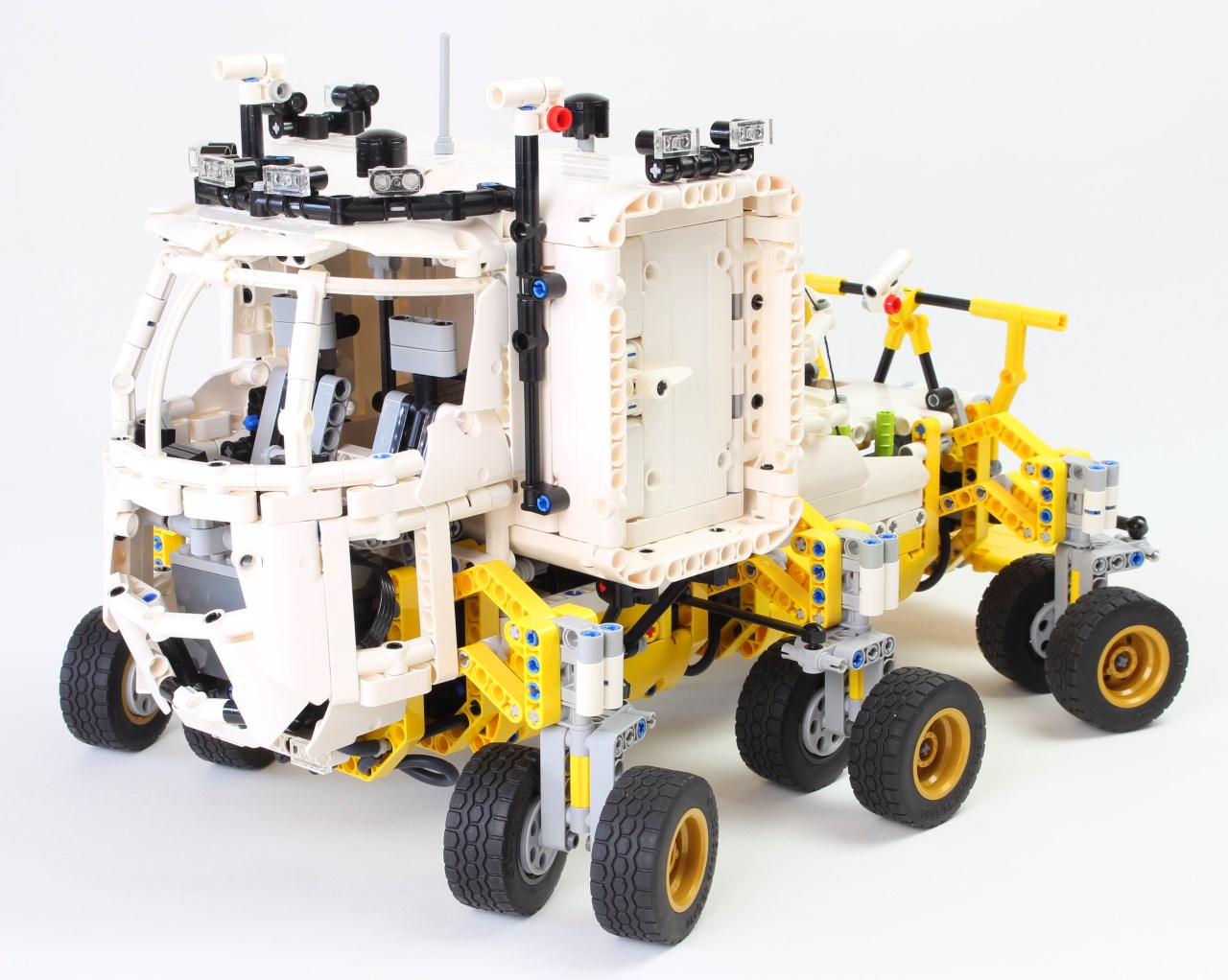
A reproduction of the Multi-Mission Space Exploration Vehicle from the NASA, featured adjustable suspension, normal and crab steering with HOG, winch, opening doors, folding suitport, and equipped interior with seat, dashboard, and living space.
The LER (Lunar Electric Rover) also called Space Exploration Vehicle) is a vehicle designed by the NASA for exploration of extraterrestrial planet or moon (The Moon or Mars). But also for establishing colony. It is powered by electricity with 6 Hub axle with 2 wheels and can move in every direction thanks to special joystick steering. The interior can welcome settler in order to live inside, make EVA (Extravehicular activity), or dock with other building or facilities which explains the particular shape of the cockpit and living space.

As a big fan of space, I wanted for a while to build a rover, but the robotic rover like Sojourner, Opportunity of Curiosity were pretty hard to build in lego because of the particular suspension arm including the motor for driving and steering, and consequently the suspended weight. That is why, I wanted to build a more wheeled based vehicle.
Because of the shape of arms of suspension on the LER, I could not manage to get it powered by electrical motor in this scale, that is why, I have chosen to make it no powered in order to have a manual creation. It has been a while that I have not make such manual creation and the result is pretty good and playable !
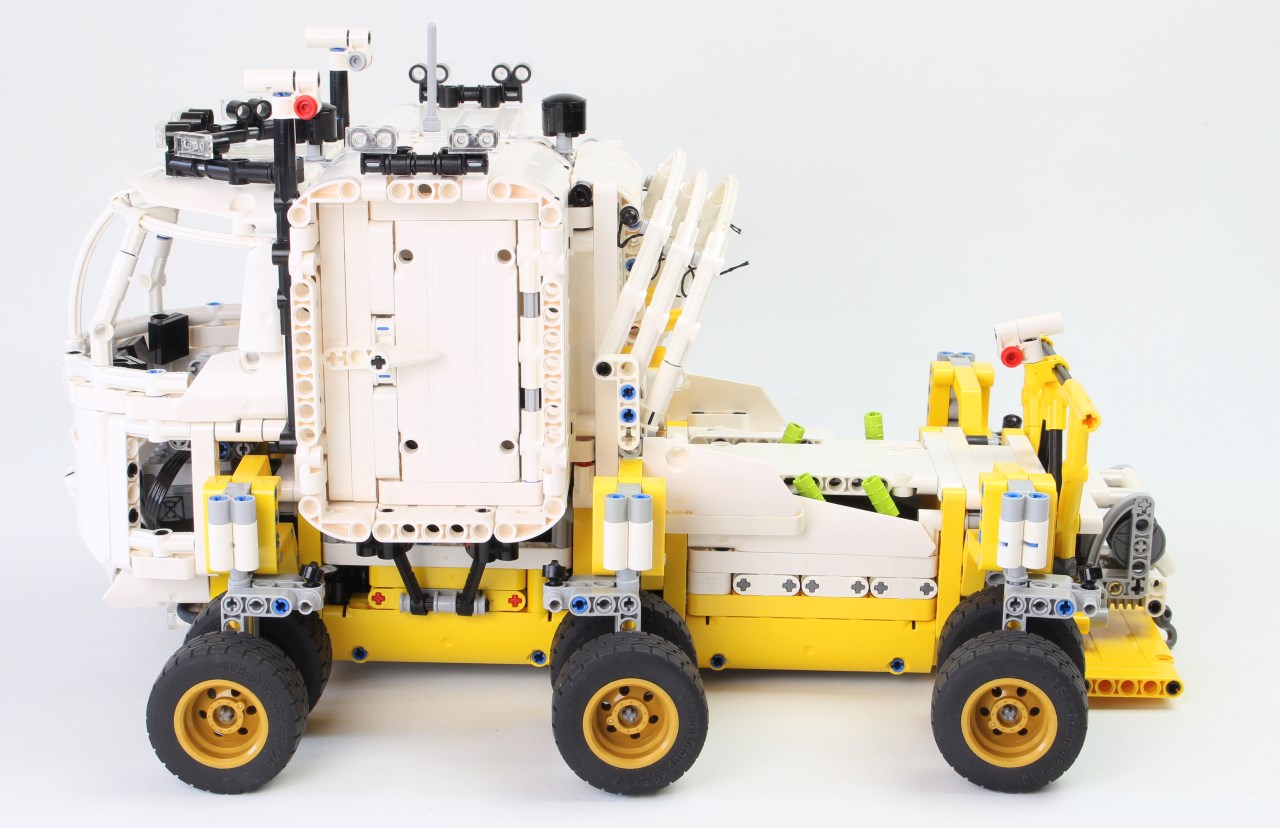
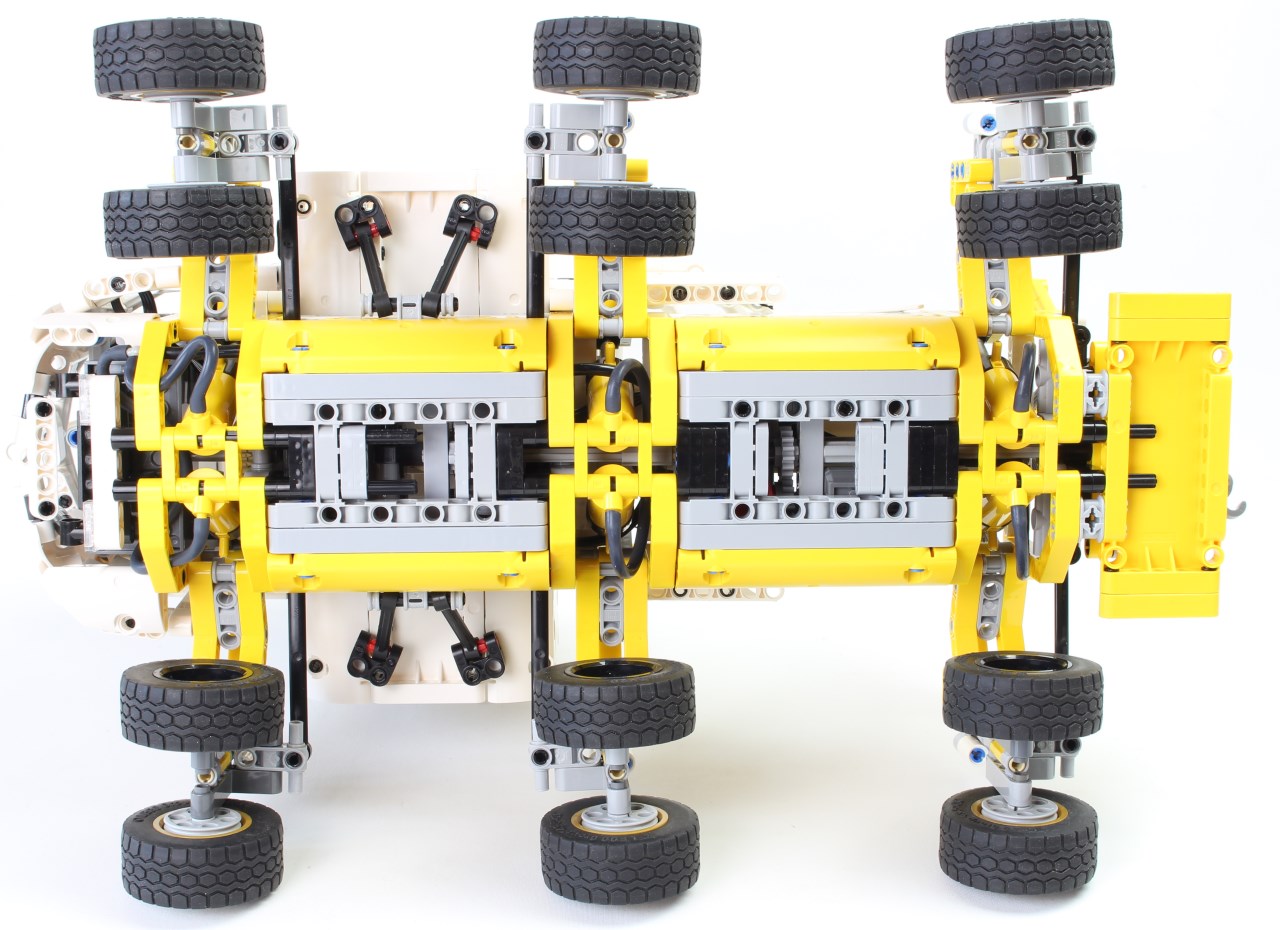
This reproduction is equipped with normal and crab steering, adjustable suspensions, winch and opening panel. The adjustable suspensions are made with pneumatic actuator with switchs and compressor. It is powered through a 2 way gearbox by a M-Motor located on the back. With the switchs the ground clearance can be adjusted for roving or docking, of course as the weight is located on the front, the suspension takes more time to raise up. The winch is operated by the same M-Motor through the gearbox with a worm screw and 8t gearing. It ensure the irreversability of the mechanism and correct speed. The PTO (power take off) of the winch can also operate any other tool in the LER, such crane, pump, drilling machine or something else.

The steering is operated on each axle by rack and pinion. There are two HOG, the first located on the top near the front operates the normal steering, by driving rear and front axle through a differential with locked cage. The second HOG placed near the first in the back operated the crab steering, by rotating the cage of the differential which is also linked to the center steering. In this case, all axle turn in same direction. It is not as effective as the real one because due to the rack and pinion, the angle of steering is set to a maximum of 45° (90° on the real LER). The real LER can also steer all axle independently which authorizes special maneuver like 360° spinning on itself. But this feature was to complex to make in lego using mechanical solution.
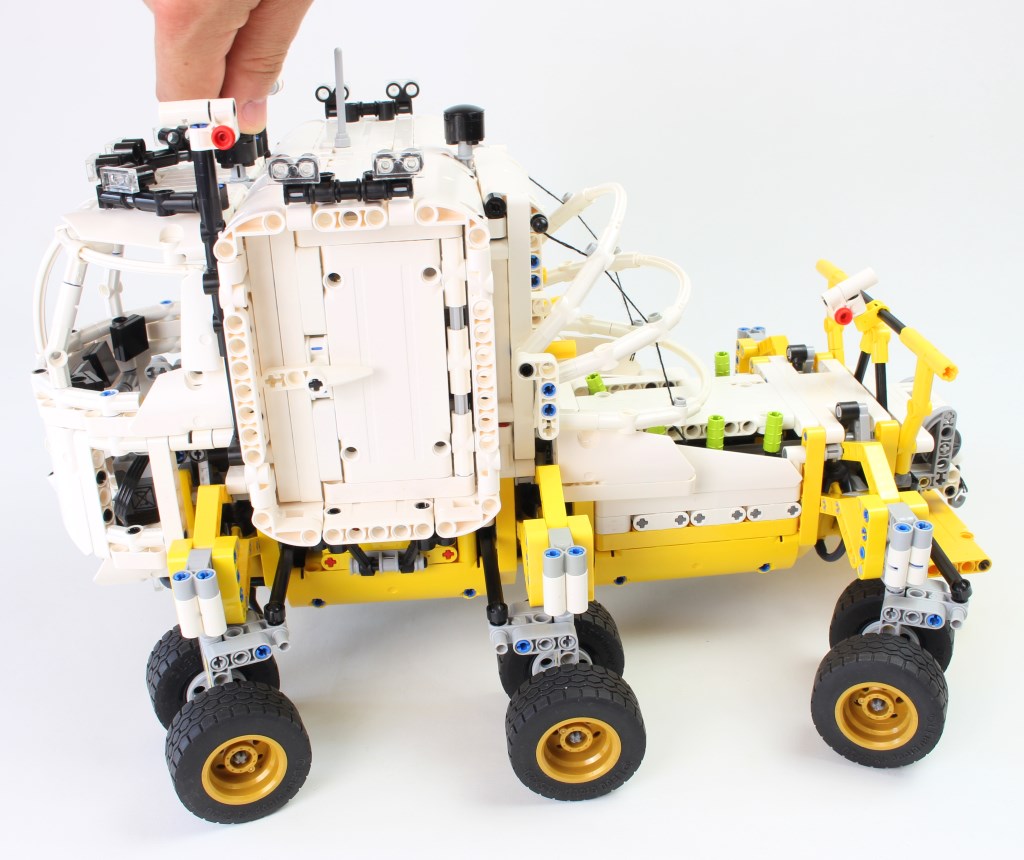
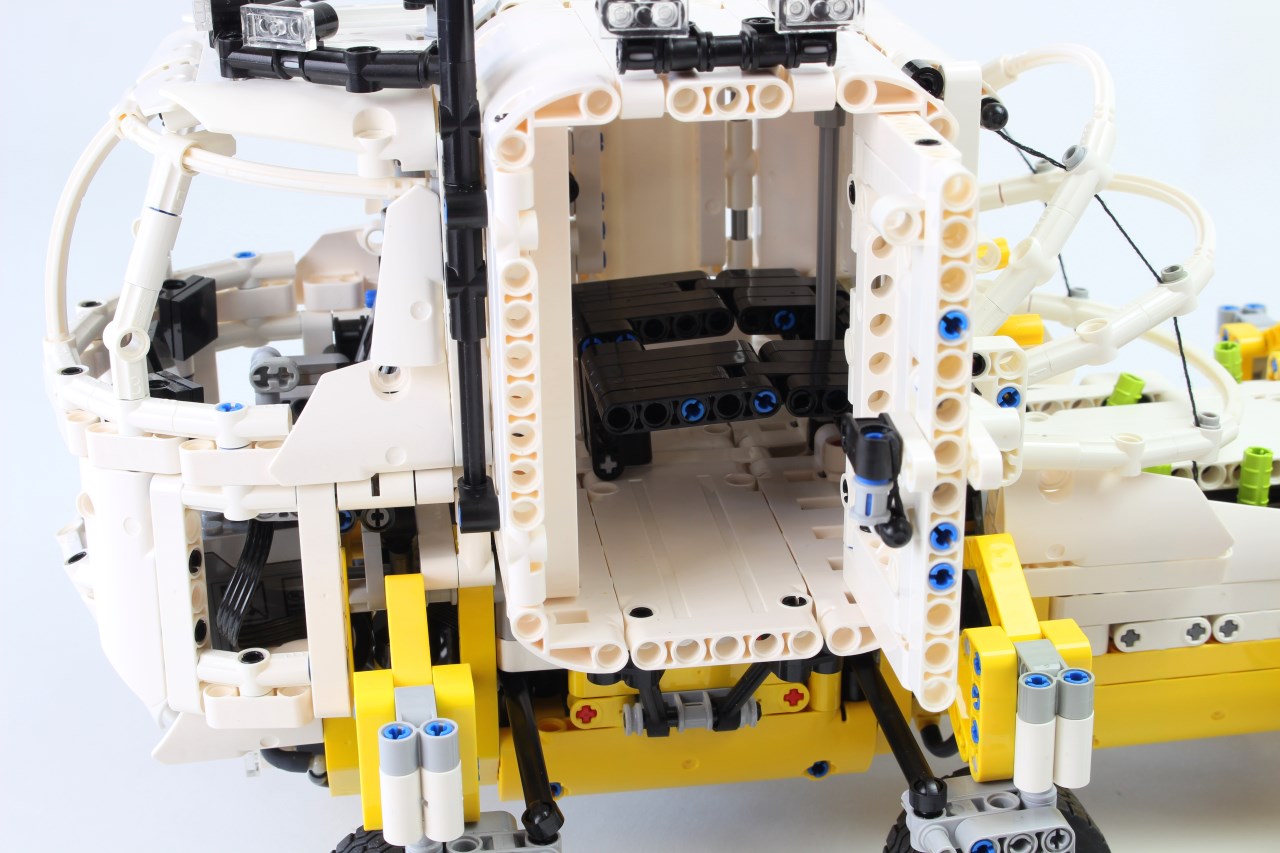
Regarding the design, I have tried to respect all features for the cabin and interior, including opening doors on left/right and on the back for suitport. In the interior, there are two folding bed, complete cockpit with seat and dashboard. the lipo battery is located in the cockpit on the floor. Also the whole cabin can be dismantled by removing 4 links underneath for easy maintenance of lego.
Due to the complex building of the chassis, I have decided to not make instruction, maybe some picture during the dismantling but not bill of material.


























(1) Comments
Really fascinating design
Comments are closed.