
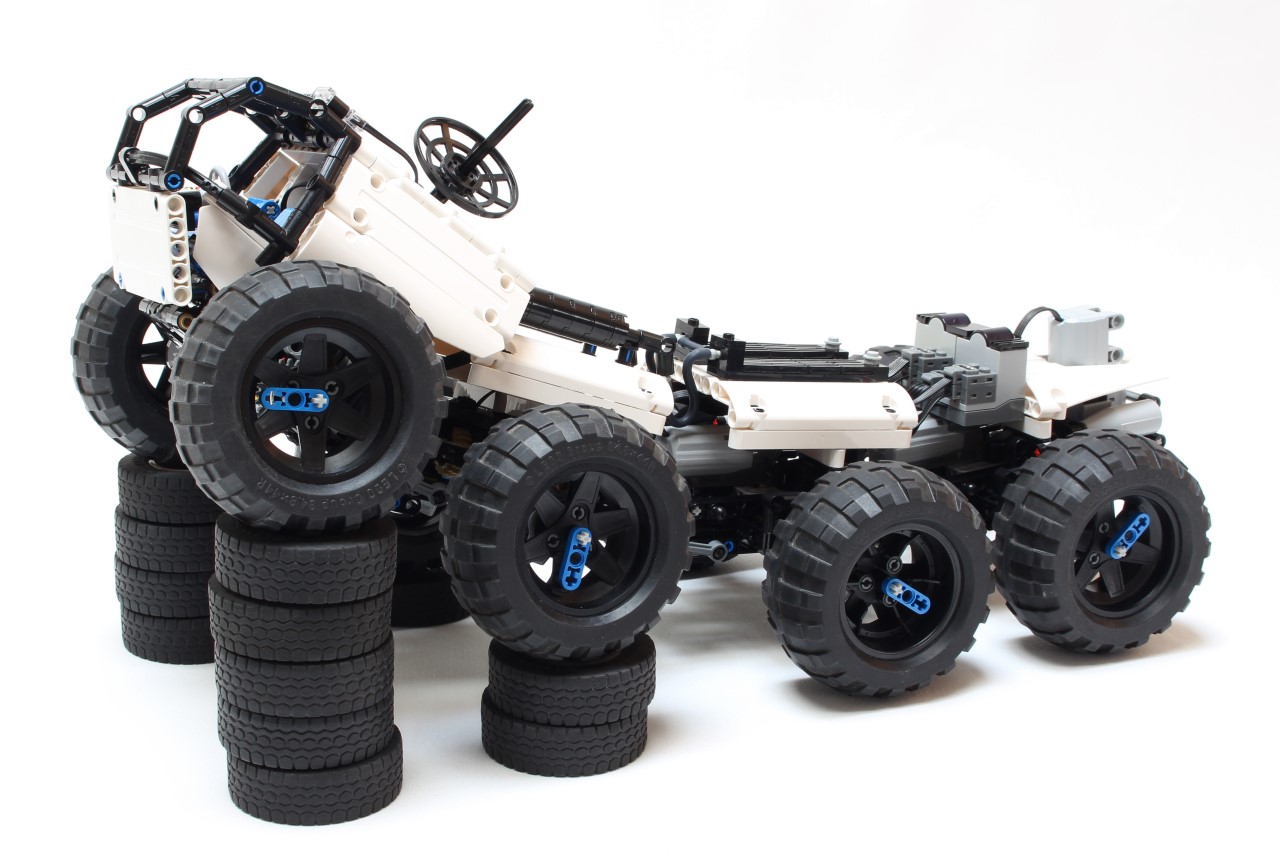
A 8×8 crawler with 4 Motors for drives, steering, and exploration rover vehicle design.

I wanted for a while to do an improvement of my 6×6 wheel snake, with 8 wheels, steering on each wheel instead of axle, and exploration vehicle design, because the previous has not a bodywork.

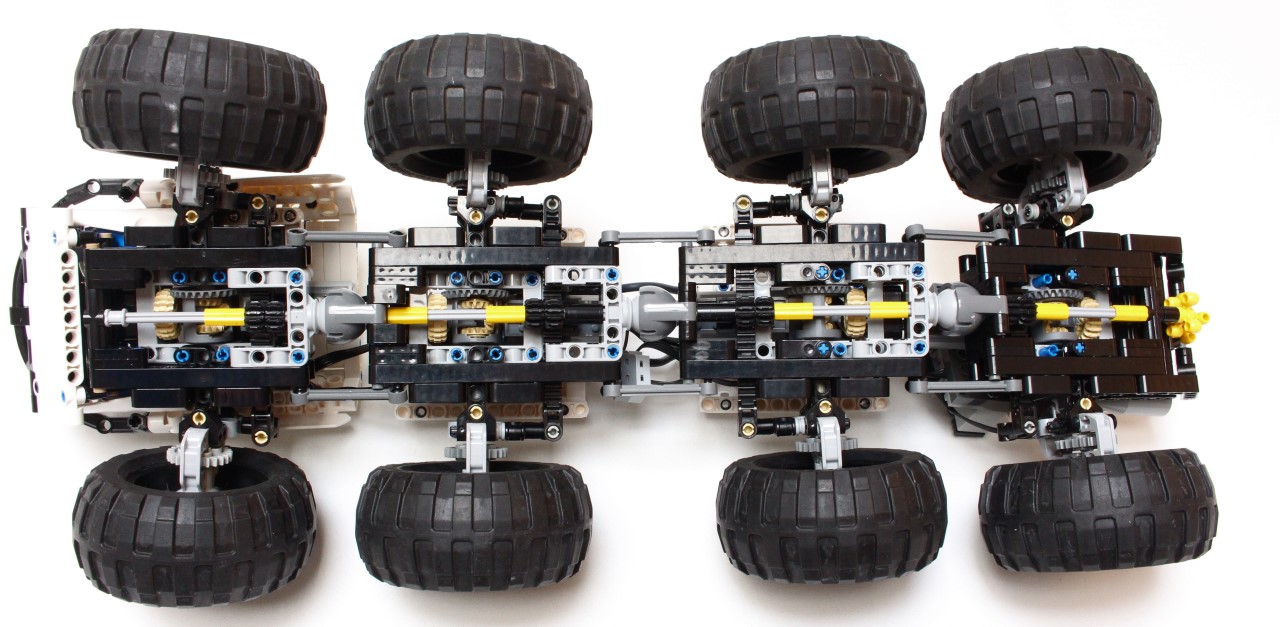
Each axle are driven by a M motor with 12/20 – 20/diff – 8/24 portal hub gearing, which ensure a good speed and torque. Because of amount of motor, I use two IR receivers, each on the same canal which drive each two motors. The steering is operated by a servo-motor on the rear connected to the IR V2 receiver. The axle of steering is located inside the ball join of each axle. It enables to have the axle of steering goes do the rear to the front axle.
There is not suspension, in fact each axle is connected with a ball join from the unimog or lego crawler. It enables to have a whole vehicle to adapt on the ground. Each axle can moves in any rotation, and direction, except the way of driving direction.
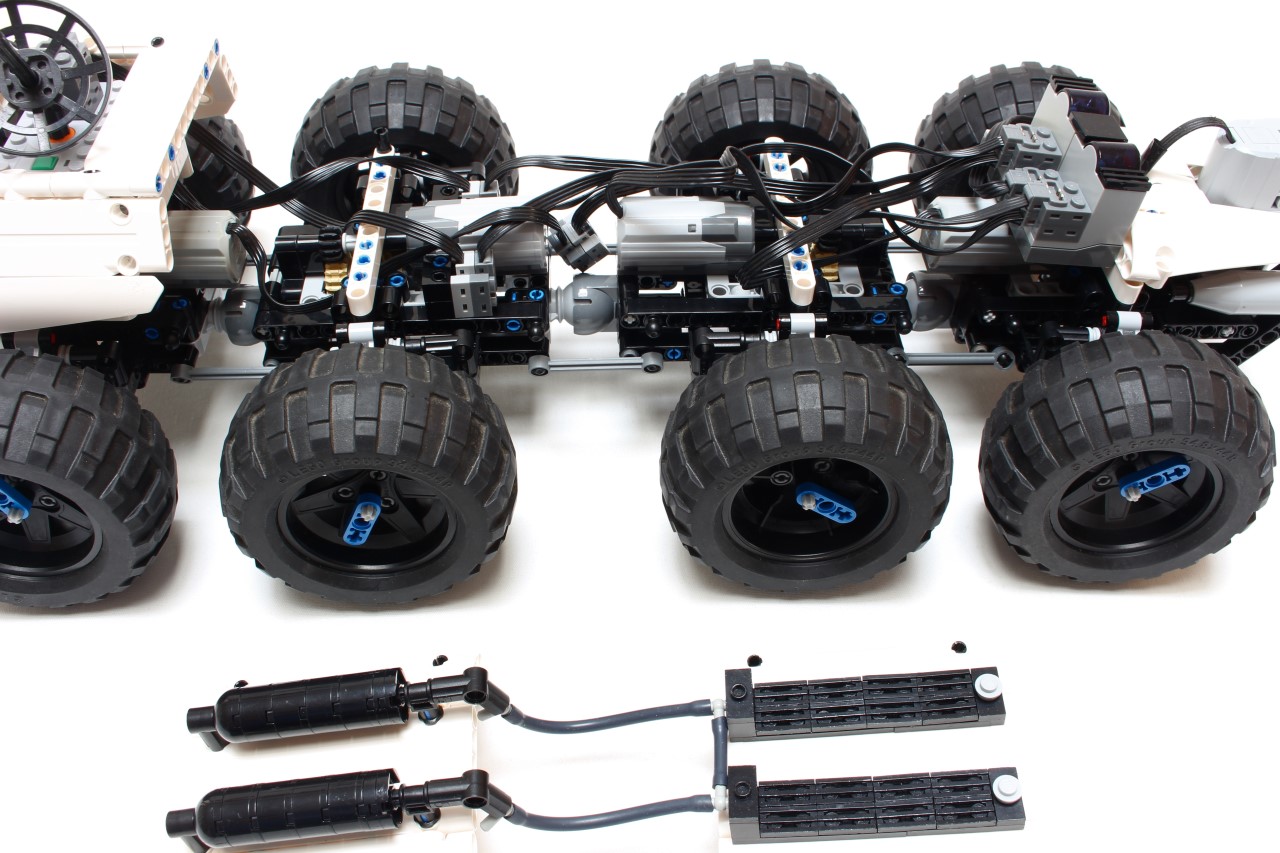
The bodywork is very simple, each axle has a small bodywork, the cabin of the front which is inspired by extra-earth exploration vehicle such as those on mars. Other axle has simple bodywork with details (radiator, energy condenser, exhaust fan).
To conclude with the climbing abilities, there are good. Especially because of the 4 M motor, one of each axle, abilities to adapt on the ground thanks to the ball join, and because of the ground clearance and low center of gravity. The steering works fine but because of the placement on the rear of the servo motor, front axle tends to not steer as much as the rear one, but it is important because 8 wheels steer, ensuring a good steering abilities too.















Here is some picture of dismantling :










































(6) Comments
Hello, you can subscribe to my youtube channel, or follow me on rebrickable, you will be notified if I release an instructions for this creation 🙂
Hi Nico,
I am interested in this lego. How can I get in touch.
Hi Nico,
I’m impressed with your models. This particular model I like because it distances a bit of the typical trucks and cars. I have looked at the pieces of your other model “Wheeled Snake”, but there are many differences. It would be possible for you to publish the parts list in Rebrickable so that I could buy the ones I am missing and build it with the help of the photos.
Thank you very much and greetings.
I don’t think so, maybe some picture of dismantling 🙂
its really cool
can you make instructions?
please?
can you make instructions for it?
please
Comments are closed.